Une caméra peut suffire à détecter et suivre un drone

Des chercheurs de l’EPFL ont élaboré des algorithmes capables de détecter et de suivre un petit engin en vol à l’aide d’une simple caméra. ©istock
Des chercheurs de l’EPFL ont démontré qu’une simple caméra peut servir à repérer et suivre à la trace un drone. Léger, économe et bon marché un tel système peut être utile pour équiper aussi les drones et augmenter la sécurité.
La multiplication des drones dans l’espace aérien pose de nombreux défis. Au premier chef, la détection de ces petits objets volant sans pilote. Régulièrement, des quasi-collisions entre un gros avion et un drone font redouter le pire. Les drones eux-mêmes sont souvent dépourvus de moyens de localiser un objet en mouvement. Pour répondre à ces défis, des chercheurs de l’EPFL ont élaboré des algorithmes capables de détecter et de suivre un petit engin en vol à l’aide d’une simple caméra. Léger, économe et bon marché, ce système pourrait aussi équiper un drone. La preuve du concept a été faite dans une thèse. Un système de détection et d’évitement en temps réel est en cours, à travers un projet de la Commission pour la technologie et l’innovation (CTI).
Les systèmes anticollision à l’œuvre aujourd’hui fonctionnent de façon active: un appareil en vol calcule sa position, son altitude et sa trajectoire et les communique aux autres engins équipés de la même technologie. Ces derniers, disposant de leurs propres données, peuvent alors évaluer le risque de collision et, le cas échéant, avertir le pilote. Le problème est que le système n’est efficace que si tous les appareils en sont dotés. Or les drones en restent dépourvus pour des raisons de coûts, de poids et d’économie de moyens.
Intelligence artificielle et Deep Learning
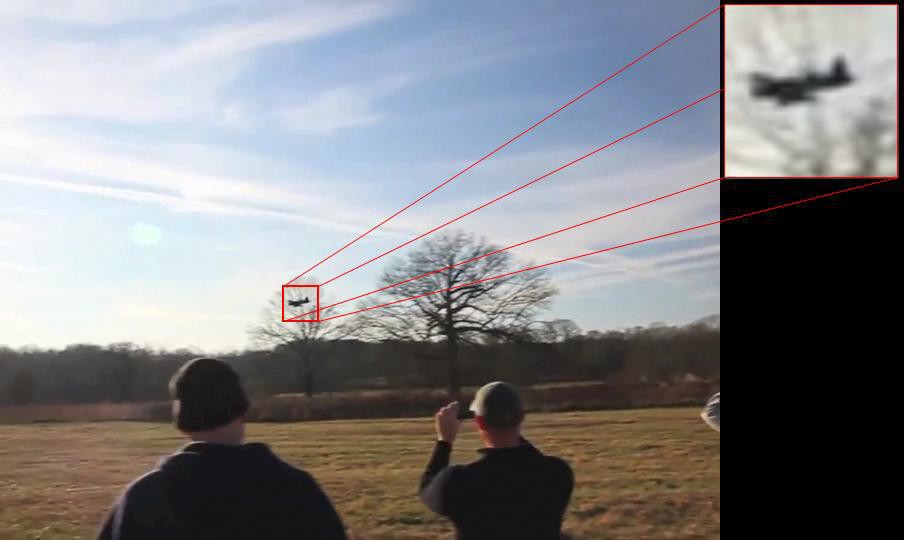
La caméra peut de façon non coopérative – tous les appareils ne sont pas tenus d’en être équipés – compléter efficacement ce dispositif pour autant qu’elle soit capable de détecter un drone en plein exercice. C’est là que les écueils émergent et que sont intervenus les chercheurs du Laboratoire de vision par ordinateur (CVLAB). Le premier défi pour la caméra mobile est de repérer un autre objet lui aussi en mouvement. L’exercice est beaucoup plus complexe que depuis une voiture dont le mouvement reste bidimensionnel. Pour le drone, il est tridimensionnel et les objets doivent être détectés sur des fonds qui peuvent être soit le ciel soit le terrain suivant l’angle de vue. Il convient aussi de détecter l’objet au plus tôt, donc quand il n’est encore par exemple qu’un point noir et flou devant un sombre bosquet. Enfin, rien aujourd’hui ne ressemble moins à un drone qu’un autre drone: comment apprendre à la caméra ce qu’est un drone dans ce «bestiaire» en pleine expansion?
Artem Rozantsev a montré dans sa thèse ces défis peuvent être relevés. La première étape consiste à apprendre à la caméra à reconnaître un drone en faisant appel à l’intelligence artificielle et au Deep Learning. Sa méthode combine les caractéristiques d’apparence (types de drone, dans toutes les positions) et de mouvement (déplacement dans le champ de vision), car aucune des deux méthodes seules n’est capable de fournir des détections suffisamment fiables. Il propose donc une technique d’apprentissage qui opère sur des cubes spatio-temporels d’intensités d’image où les patchs individuels sont alignés à l’aide d’un algorithme de stabilisation de mouvement par régression.
Performant aussi en temps réel
L’algorithme de reconnaissance ne suffit pas cependant. Pour entrainer le détecteur à reconnaître des drones de tous types et dans toutes les positions, il doit en avoir «vu» un maximum. Or dans ce domaine, la base de données existante est maigre. Le chercheur a résolu le problème en complétant le catalogue avec des images synthétiques réalistes. Basées sur un petit ensemble d’exemples réels et un modèle 3D grossier de l’objet, les données synthétiques sont générées pour compléter des exemples réels dans l’entrainement d’un détecteur. Elément clé de la méthode, les images ainsi produites se rapprochent des vraies images, non en termes de qualité d’image, mais selon les caractéristiques utilisées en entrée par l’algorithme d’apprentissage.Au final, les chercheurs obtiennent un algorithme fiable, capable de détecter un drone à partir d’une caméra légère comme celle de nos smartphones. Le projet financé aujourd’hui par la CTI a pour objectif d’entrainer le détecteur avec une base de données encore plus importante afin qu’il devienne performant et fiable en temps réel. Il est mené par les chercheurs du CVLAB en collaboration avec FLARM Technology AG, le premier fournisseur de système anticollision abordable pour l’aviation civile. Les premiers exemplaires commerciaux sont attendus pour l’année prochaine.