Un robot qui imite les mouvements de vertébrés

© 2016 EPFL
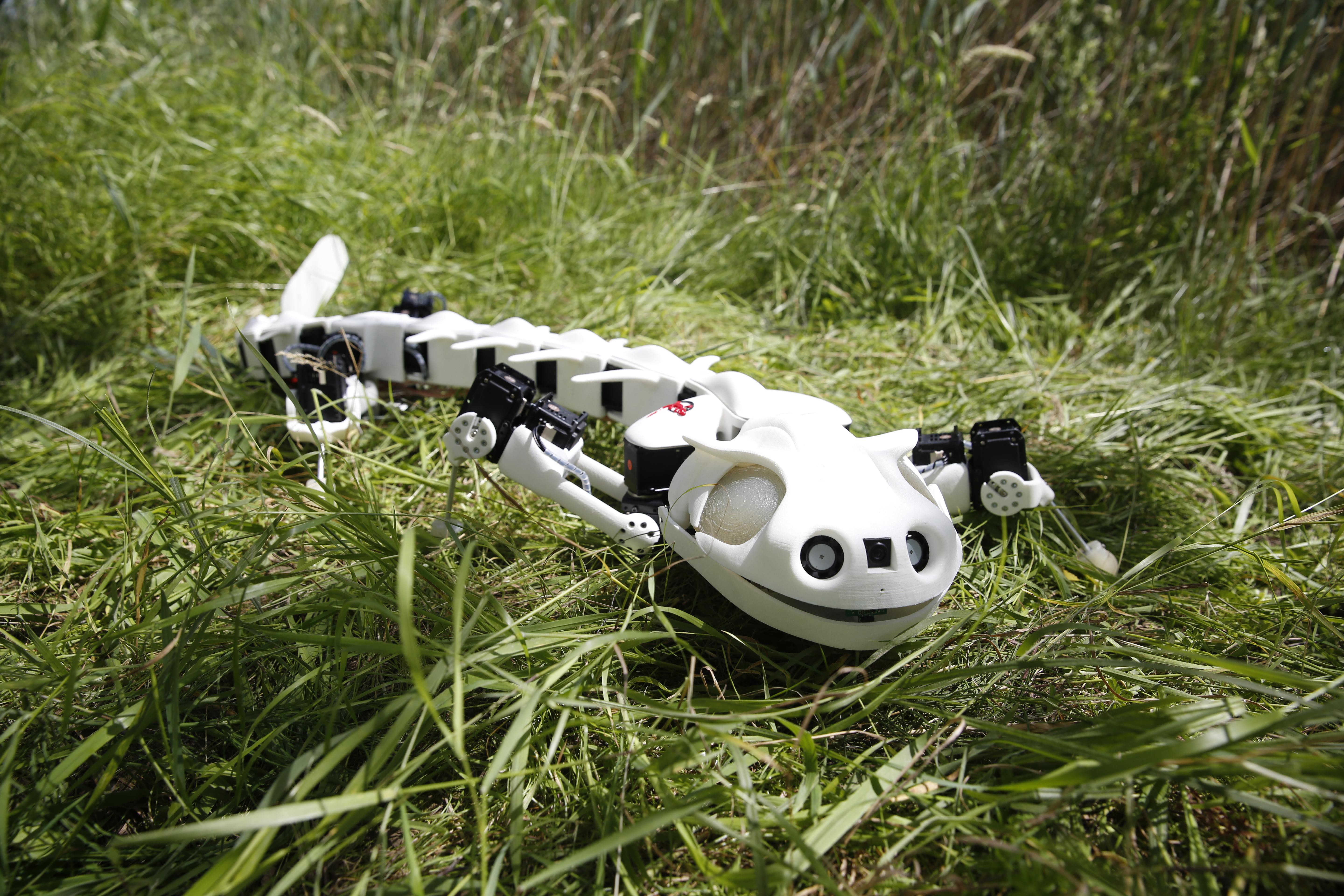
Sur la base de vidéos aux rayons X, des scientifiques de l’EPFL ont inventé un nouveau robot qui imite la marche et la nage des salamandres à un niveau de détail sans précédent. C’est un outil pour améliorer notre compréhension de l’évolution de la locomotion des vertébrés.
Des scientifiques de l’EPFL ont inventé un nouveau robot qui imite la démarche d’une salamandre à un niveau de détail sans précédent. Il est fait d’os imprimés en 3D, d’articulations motorisées et d’un circuit électronique qui lui tient lieu de système nerveux. Inspiré par l’espèce Pleurodèle de Waltl, leur « Pleurobot» peut marcher, ramper, et même nager sous l’eau. Les résultats sont publiés dans la revue de la Royal Society Interface.
Auke Ijspeert, du Laboratoire de biorobotique et son équipe ont construit des robots-salamandres par le passé, mais c’est la première fois qu’ils construisent un robot de manière si précise, sur la base des mouvements en 3D du squelette. A l’aide de vidéos aux rayons X de la salamandre, prises de dessus et de côté, ils ont étudié près de 64 points différents sur les os de l’animal tandis qu’il se déplaçait dans l’eau et sur le sol.
«Notre approche de la construction de Pleurobot est vraiment novatrice», explique Auke Ijspeert. «Il s’agissait de trouver un équilibre entre une structure osseuse simplifiée et la reproduction de la marche de la salamandre en trois dimensions.»

Les chercheurs ont conçu Pleurobot avec moins d’os et d’articulations que la créature vivante. Pleurobot possède 27 moteurs et 11 segments de colonne vertébrale, alors que l’amphibien a bien davantage d’articulations et 40 vertèbres, dont certaines peuvent tourner librement, se déplacer de côté ou en hauteur. Au cours du processus de conception, les chercheurs ont pu définir un nombre minimum de segments motorisés et leur placement optimal le long du corps du robot, de manière à ce que plusieurs allures de l’animal puissent être reproduites avec le robot.
«La locomotion animale est un processus complexe par définition», souligne Kostas Karakasilliotis, qui a conçu les premières versions du Pleurobot. «Des outils modernes comme la cinéradiographie, l’impression 3D et le calcul à haute performance nous aident à nous approcher de plus en plus de sa compréhension et de son imitation.»
Pour Ijspeert, la locomotion des vertébrés est une interaction sophistiquée entre la moelle épinière, le corps et l’environnement. C’est la moelle épinière qui contrôle les mouvements, pas le cerveau; dès lors, reproduire les mouvements de la salamandre nous donne une idée de la manière dont la moelle épinière fonctionne et comment elle interagit avec le corps. Un robot qui imite précisément les propriétés biomécaniques du corps devient un outil scientifique utile pour examiner ces interactions.
En savoir plus sur la moelle épinière de la salamandre nous éclaire sur le fonctionnement de celle de tous les animaux vertébrés, y compris la moelle épinière des êtres humains. La morphologie de l’amphibien ressemble étroitement à celle des premières créatures terrestres, et donc, du point de vue de l’évolution, la salamandre est notre ancêtre.
Des neurobiologistes ont montré que la stimulation électrique de la moelle épinière est ce qui fait que la salamandre marche, rampe ou nage. Au plus bas niveau de stimulation, la salamandre marche; au niveau suivant, l’allure de la salamandre s’accélère; et au-delà, la salamandre commence à nager. Pleurobot est programmé pour reproduire ces caractéristiques.
Auke Ijspeert pense que la compréhension des principes fondamentaux de cette interaction entre la moelle épinière et la locomotion du corps contribuera au développement de futures thérapies et de dispositifs neuroprosthétiques pour des patients paraplégiques et des amputés. De plus, il estime que la méthodologie qu’il présente peut être utilisée pour développer d’autres types de biorobots, et que de tels robots vont être de plus en plus utilisés en tant qu’outils scientifiques dans les neurosciences et la biomécanique.
Cette recherche a reçu un financement de NCCR Robotics et du Fonds National Suisse.