Un robot pliable de 4 grammes qui rampe et qui saute

© Alain Herzog / EPFL
Des chercheurs de l'EPFL présentent un robot pliable et reconfigurable, capable de ramper et de sauter. Inspiré directement de la chenille, il représente un nouveau paradigme pour la robotique.
Une structure rigide et des moteurs électroniques...telle est habituellement l'image qui nous vient à l'esprit lorsque l'on pense au concept de «robot». Dans le laboratoire de robotique reconfigurable de Jamie Paik, ce terme prend une toute autre dimension. L'équipe de la chercheuse bouleverse les conventions et réalise des robots plats, ultralégers et pliables, qui sont à l'image des origamis.
Le dernier-né de ces robots origamis ou «robogamis», Tribot, a été présenté à l'International Conference on Intelligent Robots and Systems (IROS). Doté d'une structure en forme de «T» et de trois «membres», Tribot est inspiré directement de la chenille et ne pèse que 4 grammes. Haut de deux centimètres, il possède une qualité qui le rend unique : la capacité de passer presque instantanément du mode de déplacement «ramper» au mode «sauter». Il peut donc sauter au-dessus d'obstacles, puis continuer sa route en rampant. «Ce robot atypique peut sauter jusqu'à 7 fois sa hauteur, et il n'a pas besoin d'être réinitialisé entre les sauts», commente Jamie Paik.
Des moteurs intelligents activés par la chaleur
Réaliser un robot aussi léger qu'une pièce de 20 centimes suisses n'a pas été chose facile pour les concepteurs, qui ont dû faire face à plusieurs défis techniques. Pas question par exemple d'utiliser des moteurs traditionnels bien trop lourds et volumineux. Ici, tous les mouvements reposent sur des actionneurs et des ressorts intelligents, faits d'alliages à mémoire de forme (AMF).
Les alliages à mémoire de forme ont la particularité de pouvoir mémoriser leur forme initiale. Une fois déformés, il suffit de les chauffer pour les faire retourner à leur forme d'origine. Les chercheurs ont utilisé un alliage de ce type - titane et nickel- pour entraîner un mouvement chez leur robot ultraléger. L'astuce consiste à chauffer différentes parties du robot pour induire une locomotion. «Nous avons doté le robot de nombreux actionneurs faits d'alliage à mémoire de forme, isolés les uns des autres. En les activant de manière alternative, le robot commence à ramper. Le mode de saut est quant à lui enclenché en actionnant les ressorts, eux aussi faits d'alliage à mémoire de forme», précise Zhenishbek Zhakypov, co-auteur de la publication.
Il existe deux façons de chauffer les actionneurs : en envoyant de l'électricité via des fils, ou en utilisant des micro-chauffages sans-fils customisés. Cette dernière option permet au robot d'être complètement autonome.
Aussi simple à construire qu'un meuble en kit
Le robot Tribot est fait d'une structure simple «en sandwich», facilement reproductible dans le cadre d'une production de masse. Il s'agit d'assembler plusieurs couches en deux dimensions afin de créer un robot à trois membres. «A l'image des meubles ikea, on pourrait imaginer envoyer ces robots sous forme de couches plates, qu'il suffirait ensuite d'assembler», illustre Jamie Paik. Dans leur publication, les chercheurs démontrent qu'il est également possible de construire Tribot en utilisant l'impression 3D, un procédé extrêmement rapide.
Des applications encore à définir
Atypique à bien des égards, Tribot, tout comme ses autre congénères «robogamis», ouvre une nouvelle dimension en termes de robotique. Capables d'alterner les modes de locomotion et de s'adapter à l'environnement en se reconfigurant, ces robots feraient de bons candidat pour se déplacer sur des terrains accidentés, par exemple.
Pour l'heure, les scientifiques continuent à perfectionner leurs robogamis. Il s'agit notamment de les doter des capteurs (accéléromètres, micro-caméras, etc.), et de les faire interagir ensemble.
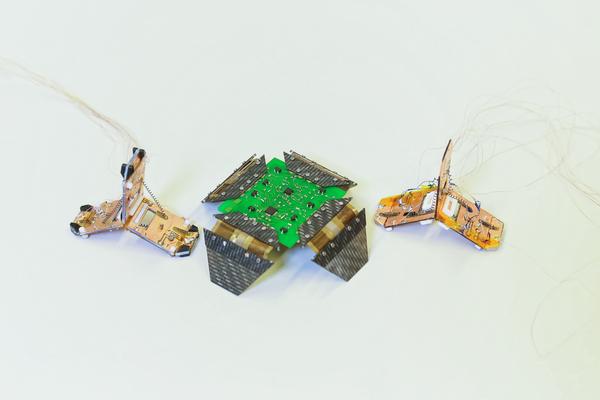
Deux "Tribots" entourent un de leur congénère robogami, du Laboratoire de robotique reconfigurable. © Alain Herzog
Conférence : Zhenishbek Zhakypov_, Mohsen Falahi_, Manan Shah, and Jamie Paik, The design and control of the multi-modal locomotion origami robot, Tribot, IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS
Other publication on the other robogami: A. Firouzeh and J. Paik. Robogami: A Fully Integrated Low-Profile Robotic Origami, in Journal Of Mechanisms And Robotics-Transactions Of The ASME, vol. 7, num. 2, 2015.
Laboratoire de robotique reconfigurable
Recherche soutenue par le NCCR Robotics et le STI Additive Manufacturing fund