Un robot nageur pour étudier la locomotion et les neurosciences
Grâce à leur robot imitant une lamproie, des chercheurs de l’EPFL ont potentiellement découvert pourquoi certains animaux vertébrés conservent des capacités locomotrices après des lésions de la moelle épinière. Leurs travaux devraient également permettre d’améliorer la performance des robots nageurs de sauvetage et de monitoring environnemental.
Pour étudier la locomotion chez les animaux et plus particulièrement les principes de neurosciences derrière la génération d’un mouvement, le Laboratoire de biorobotique (BIOROB) de l’EPFL développe des robots innovants capables de reproduire ces aspects clés des animaux. Leur robot nageur baptisé AgnathaX vient de faire l’objet d’une publication dans la revue Science Robotics en collaboration avec des chercheurs de l'Université de Tohoku au Japon, l'Institut Mines-Télécom Atlantique à Nantes en France et l'Université de Sherbrooke au Canada.
«Avec ce robot, notre but était d’étudier la manière dont le système nerveux prend en compte les informations sensorielles pour générer un type de mouvement donné», indique Auke Ijspeert, Professeur à la Faculté des Sciences et Techniques de l’Ingénieur de l’EPFL, à la tête de du Laboratoire BIOROB. Ceci est compliqué à analyser dans un organisme vivant, car les composants centraux et périphériques du système nerveux* sont hautement interconnectés dans la moelle épinière ce qui rend difficile la compréhension de leur dynamique et la façon dont ils s'influencent mutuellement.»
Lire aussi :Un robot reproduit la démarche d'un animal fossilisé
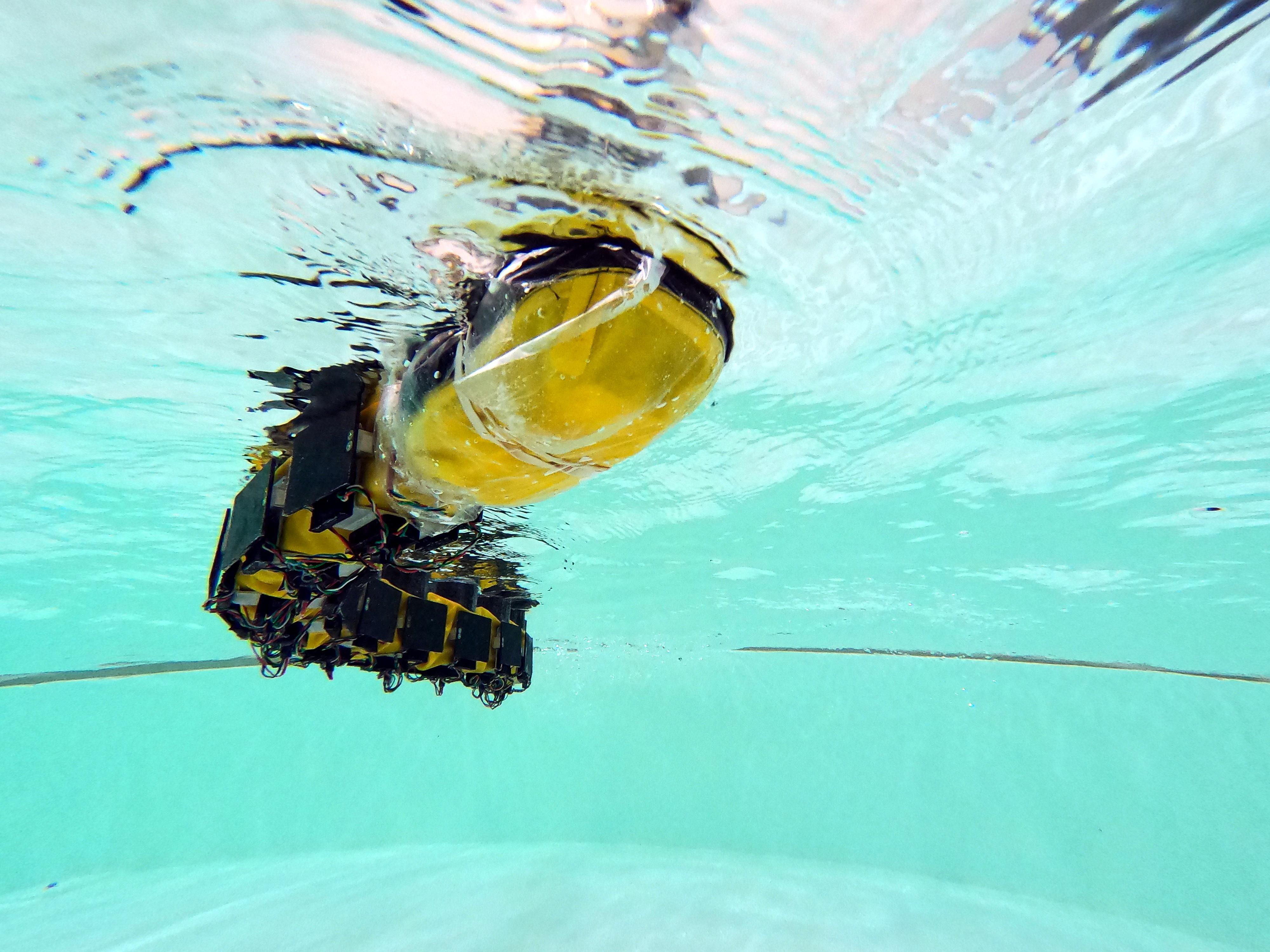
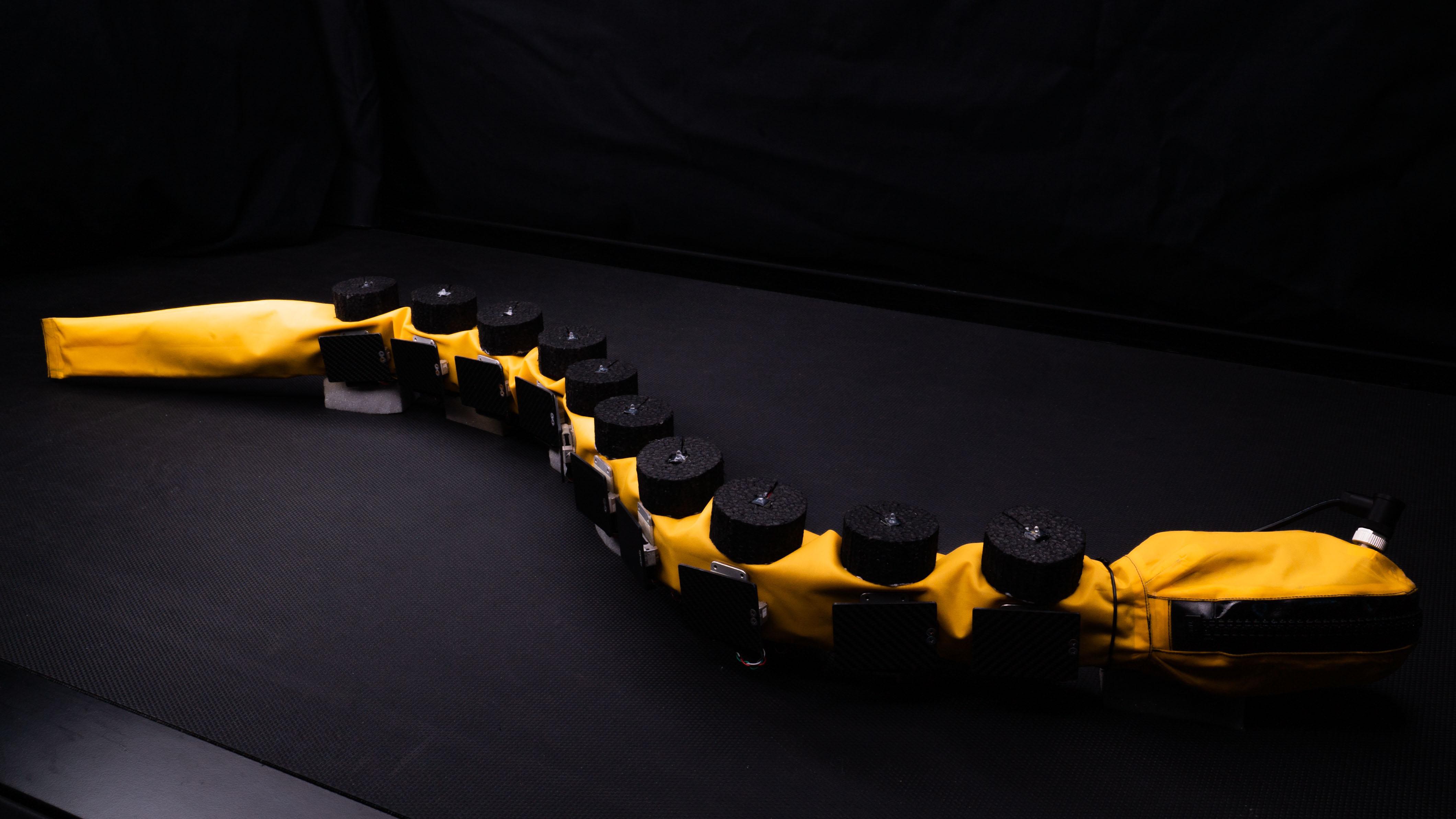
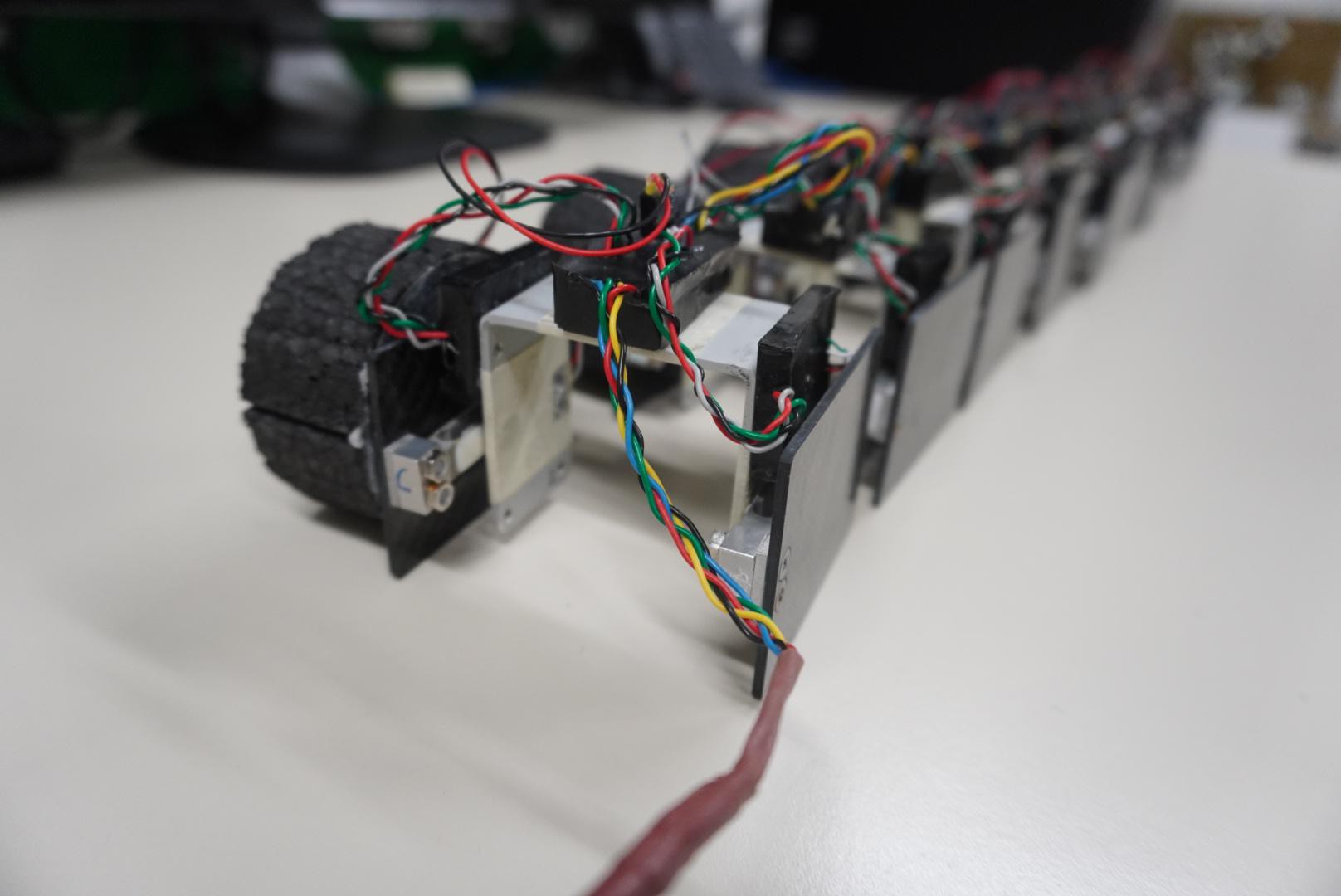
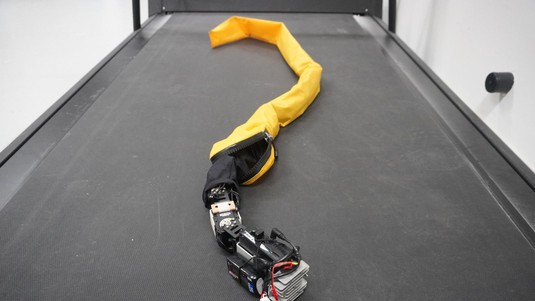
AgnathaX est un robot nageur qui imite la lamproie, un poisson primitif ressemblant à une anguille. Comme l’animal, il est capable de nager en faisant onduler son corps. Une série de moteurs permettent d'actionner les 10 segments qui le composent comme le feraient les muscles le long du corps de l’animal. Des capteurs de force sont distribués latéralement le long du corps du robot, similaires aux neurones sensibles à la pression de l’eau dans la peau de la lamproie.
Avec des modèles mathématiques, les chercheurs ont pu recréer les différentes composantes du fonctionnement complexe du système nerveux dans leur robot. «Nous l’avons fait nager dans une piscine équipée d'un système de suivi des mouvements qui nous permet de quantifier les déplacements du robot, explique Laura Paez, doctorante au Laboratoire BIOROB. À chaque segment, les entrées et sorties du système nerveux périphérique et central pouvaient être activées ou désactivées, de manière à correspondre aux différentes hypothèses de neurosciences.»
Les résultats de leur étude indiquent que le système nerveux central et le système nerveux périphérique contribuent tous deux à la génération d'une locomotion robuste. L'utilisation des deux systèmes était avantageuse en cas de perturbations neuronales comme des défaillances dans la communication entre les segments du corps ou des capteurs désactivés. «Autrement dit, lorsque le robot combinait des composants centraux et périphériques, il pouvait résister à un plus grand nombre de perturbations neuronales et continuer à nager à grande vitesse, comparé à un robot qui n’aurait qu’un seul de ces composants, précise Kamilo Melo, co-auteur de la publication. Nous avons également constaté que les capteurs de force à la surface du robot et les interactions physiques entre le corps et l'eau peuvent fournir des signaux très utiles pour générer et synchroniser l'activité musculaire rythmique nécessaire à la locomotion». En effet, lorsque la communication entre les segments était coupée (simulant une lésion de la moelle épinière), les forces de pression hydrodynamiques contre le corps de l’animal suffisaient à entraîner un mouvement d’ondulation du robot.
Ces résultats vont permettre de renforcer les performances des robots de sauvetage ou de monitoring environnemental. Les contrôleurs et capteurs de force développés par les chercheurs peuvent améliorer leur navigation à travers des courants instables et les rendre robustes contre des défaillances techniques. Ce travail a également des implications dans le domaine des neurosciences. Il confirme que des mécanismes périphériques assurent des fonctions importantes et sont sous-estimés par rapport aux mécanismes centraux bien mieux connus. «Ils pourraient jouer un rôle important dans la récupération de la fonction motrice après une lésion de la moelle épinière, car, en principe, aucune connexion entre différentes parties de la moelle épinière n'est nécessaire pour maintenir une onde ondulatoire le long du corps, ajoute Robin Thandiackal, co-auteur de la publication. Ceciexplique potentiellement comment certains vertébrés conservent des capacités locomotrices après des lésions de la moelle épinière.»
Système nerveux central VS périphérique *
La locomotion chez les vertébrés est un mécanisme complexe qui implique le système nerveux central (le cerveau et la moelle épinière) et le système nerveux périphérique (les nerfs reliés aux muscles et les neurones sensoriels).
Depuis le début du siècle dernier, un long débat a lieu dans le domaine des neurosciences pour déterminer comment les rythmes neuronaux nécessaires à la locomotion sont créés et synchronisés. Certains chercheurs, comme Charles Scott Sherrington, pensaient que les rythmes sont générés principalement par des signaux de rétroaction sensorielle, c'est-à-dire par un mécanisme périphérique. Une nageoire ou un membre est déplacé dans une direction jusqu'à ce que cela déclenche un signal sensoriel lui indiquant de se déplacer dans l'autre direction. D'autres chercheurs, comme Thomas Graham Brown, estimaient que les rythmes sont plutôt produits par des circuits oscillatoires spécifiques dans le système nerveux central. Depuis lors, le débat entre mécanismes centraux et périphériques a fortement tourné en faveur des mécanismes centraux avec la découverte des circuits neuronaux dans la moelle épinière qui peuvent produire des rythmes coordonnés même lorsqu'ils sont complètement déconnectés du retour sensoriel.
La présente étude démontre que les deux types de systèmes nerveux sont importants, qu’ils peuvent tous les deux produire des mouvements de nage, et qu’ensemble ils produisent une locomotion plus robuste qu’individuellement.




Fonds national suisse (FNS), KM-RoBoTa, NCCR Robotics, Human Frontier Science Program (Bourse RGP0027/2017), Conseil de recherches en sciences naturelles et en génie du Canada (CRSNG), Fonds de Recherche en Santé du Québec (FRQS) et Instituts de recherche en santé du Canada (IRSC).
R. Thandiackal, K. Melo, L. Paez, J. Herault, T. Kano, K. Akiyama, F. Boyer, D. Ryczko, A. Ishiguro, A. J. Ijspeert, Emergence of Robust Self-Organized Undulatory Swimming Based on Local Hydrodynamic Force Sensing. Science Robotics. 11 Aug 2021. DOI: 10.1126/scirobotics.abf6354
Images à télécharger