Un robot de l'EPFL envoyé dans l'espace

L'astronaute Luca Parmitano utilise la plateforme dhaptique pour piloter un robot sur terre©2019 ESA
Une interface dérivée du célèbre robot delta développé par Reymond Clavel à l’EPFL vient de rejoindre la station spatiale internationale (SSI). Conçue par Force Dimension -spin-off de l’EPFL-, elle a été envoyée aux astronautes pour leur permettre de piloter à distance des robots explorateurs sur la lune ou sur mars.
Pour réparer des satellites dans l’espace, ou explorer des environnements hostiles tels que la lune ou mars, l’ESA étudie la possibilité de passer par des robots sophistiqués, pilotés depuis la station spatiale internationale (SSI) à l’aide d’une manette haptique. Les astronautes en charge de téléopérer ces robots pourraient ainsi ressentir tactilement tout ce que le robot découvre et entreprend.
Dans le cadre de ce projet baptisé METERON, l’ESA a porté son choix sur le célèbre robot delta, conçu il y a 34 ans dans les laboratoires de l’EPFL par le professeur Reymond Clavel à la faculté des Sciences et Techniques de l’Ingénieur. Décliné sous la forme d’une plateforme haptique par la compagnie Force Dimension – une spin-off de l’EPFL issue du VRAI groupe, dirigé par Charles Baur -, le système haptique, nommé sigma.7, a rejoint la station spatiale internationale (SSI) au début du mois. Il est maintenant entre les mains des astronautes de la station, qui effectuent les premiers tests.
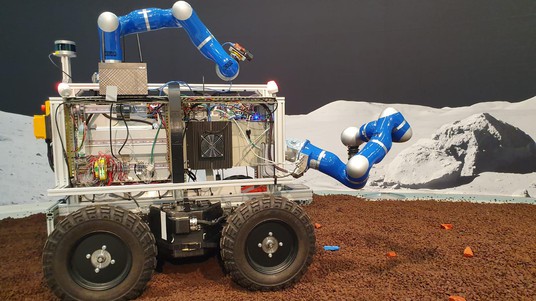
Comme il n’y a pas encore de robots téléopérables sur la lune ou mars, les pilotes s’entraînent pour l’instant sur des robots restés sur terre. Un premier test a déjà eu lieu et a donné de très bons résultats. Les astronautes de la SSI ont utilisé le sigma.7 pour piloter un robot en Hollande, dans l’un des centres de l’ESA. Le robot a effectué un parcours d’obstacles, puis a collecté des pierres. Une nouvelle démonstration publique a eu lieu le 25 novembre.

Sigma.7 en phase de test. credit photo: ESA
«Ressentir » son environnement comme si on y était
Le concept repose sur l’utilisation de deux machines aux rôles bien distincts. Sur le terrain, un robot de forme variable bardé de capteurs- accéléromètre, capteurs de force, etc. - entre en contact avec son environnement. A l’intérieur de la SSI, une interface haptique de pilotage telle qu’utilisée en robotique chirurgicale, fournit aux astronautes un retour tactile précis de l’exploration, sous forme de forces et vibrations dans les mains. «Le pilote peut par exemple déceler si la matière que le robot touche est rigide, molle, lisse ou rugueuse», explique François Conti, co-fondateur de Force Dimension. «L’idée est que le robot devienne un avatar de l’astronaute, c’est-à-dire une sorte d’extension de lui-même.»

Grâce à un bras robotique, le robot peut interagir avec l'environnement et soulever des objets
L’opération se fait pratiquement en temps réel. «Une communication terre-lune peut engendrer un délai de quelques secondes », illustre François Conti. « Mais l’ESA travaille sur de nouvelles technologies qui permettront de compenser ces délais ». Depuis une station spatiale orbitant autour de la lune, ces délais seraient réduits. Dans le futur, des astronautes piloteront les robots lunaires et martiens, alors qu’ils orbitent autour de la lune ou de la planète Mars.
"Pour une sortie sur la Lune, la préparation d'un astronaute - enfiler la combinaison et ouvrir le sas- prend des heures", explique Jessica Grenouilleau, directrice du projet Meteron au sein de l’Exploration Systems Group de l'ESA, " en donnant aux astronautes la possibilité de contrôler les robots dans le confort et la sécurité de leur base ou vaisseau spatial, de nouvelles possibilités s’offrent à nous. »
Résister aux vibrations d’une fusée
Léger, ultra-maniable et très rapide, le robot delta remplit à la base bon nombre de critères pour une mission dans l’espace. Les ingénieurs de Force Dimension ont toutefois dû travailler dur pour rendre le sigma.7 compatible avec une utilisation spatiale, et s’assurer qu’il résiste aux vibrations lors du décollage de la fusée. «Malgré des délais très courts, notre appareil avait passé tous les tests de qualification à la fin de l’été», se réjouit François Conti. Le robot a ensuite été emballé spécialement pour résister aux vibrations, puis envoyé dans l’espace à bord de la capsule spatiale Cygnus propulsée par la fusée Antares, depuis la Wallops Flight Facility en Virginie aux Etats-Unis. Une mission baptisée NG-12 qui avait pour but de ravitailler la Station Spatiale Internationale.
Imaginé au départ pour le packaging de chocolats, biscuits, médicaments, et également comme machine de métrologie, le robot Delta a fait du chemin. Dans sa version haptique, il a récemment été utilisé pour piloter de robots lors d’opérations chirurgicales, ou pour faire de l’exploration sous-marine ultra-profonde. Il part à présent à la conquête de l’espace. «Cette version remarquable adaptée aux spécificités et contraintes l’espace élargit le «terrain de jeu» des robots delta», se réjouit Reymond Clavel. «Je félicite les ingénieurs de Force Dimension pour ce nouveau succès.»