Un logiciel pour améliorer la cartographie par drone

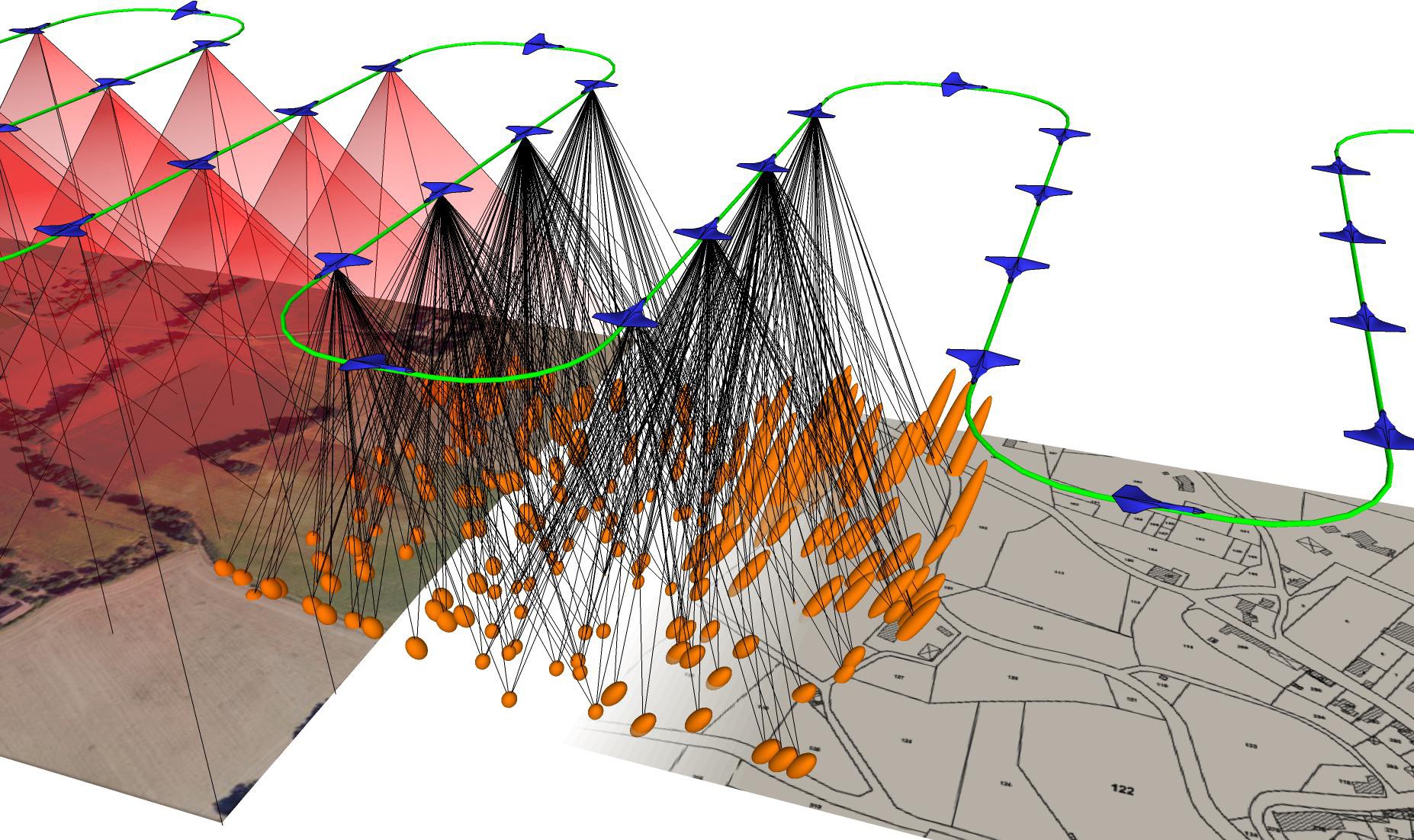
Photogrammétrie aéroportée par drone. © E.Cledat / TOPO / EPFL
Utiles dans de multiples secteurs de la société, la cartographie par drone est en plein essor. À travers sa thèse, un chercheur de l’ENAC permet d’en augmenter encore la précision et la fiabilité.
Rendre la cartographie par drone de plus en plus précise: telle est l’une des missions menées par le Laboratoire de topométrie (TOPO), dirigé par Bertrand Merminod. Car, avant d’être un jouet pour petits et grands, les drones rendent de nombreux services à la population. Ils permettent par exemple de prévenir les accidents en surveillant les barrages et les voies ferrées. Créent des copies numériques en 3D de monuments historiques, en cas de destruction accidentelle ou volontaire. Enfin, les images récoltées d’une saison à l’autre peuvent servir à mesurer l’érosion d’un sol.
«Être le plus précis possible est très important», indique d’emblée Emmanuel Cledat, qui vient de terminer sa thèse au laboratoire TOPO. «Quand on observe le léger déplacement d’une falaise après l’hiver, il faut pouvoir distinguer s’il s’agit d’un réel changement topographique ou d’une erreur de géoréférencement.» Durant quatre ans, le chercheur a développé un logiciel capable de traiter le plus précisément possible les données récoltées par différents capteurs embarqués sur un drone. Une publication issue de sa thèse lui a valu le Prix du meilleur jeune auteur de la Société internationale de photogrammétrie et télédétection (ISPRS) 2020.
Les avions ou hélicoptères dédiés à la cartographie sont généralement équipés de quatre sortes de capteurs: un GPS (ou GNSS) et une centrale inertielle (Inertial Measurement Unit – IMU), qui déterminent ensemble la position et l’orientation géographiques de l’appareil, un appareil photographique et un LIDAR, qui, lui, détermine des distances en mesurant le temps que met un rayon laser pour faire un aller-retour du capteur vers l’objet à mesurer.
Miniaturisation et hybridation
Jusqu’il y a peu, les LIDARs pouvaient atteindre près de 10 kilos. Le laboratoire TOPO ainsi que Helimap System SA, une spin-off de l’EPFL, ont été précurseurs dans la cartographie aéroportée par hélicoptère, sur lequel des équipements lourds peuvent être embarqués, à l’exemple d’un LIDAR et d’une centrale inertielle haut de gamme. L’industrie et les chercheurs se sont toutefois attelés ces dernières années à miniaturiser ces instruments de mesure. En hybridant antenne GNSS, LIDAR, centrale inertielle et appareil photographique, Emmanuel Cledat a réussi à obtenir avec un drone des résultats presque aussi précis qu’avec les méthodes héliportées – favorisant ainsi le développement d’une méthode moins polluante et plus à même de surveiller les lieux inaccessibles. Une partie de sa thèse a consisté à calibrer précisément chaque capteur pour les utiliser au mieux et ainsi être le plus fiable possible. Dans ce but, il a rénové les champs de calibrations du laboratoire TOPO, situés près de Vufflens-la-Ville (VD). Ses travaux sur la calibration de la caméra lui ont valu le Prix de l’ISPRS.
Le logiciel d’ajustement en bloc qu’il a implémenté permet aux différentes données de se corroborer et de se corriger les unes les autres. Il offre au bout du compte une image précise, tant de la scène captée que de la position et de l’orientation du drone. L’outil développé par Emmanuel Cledat fera l’objet d’un développement ultérieur au sein du laboratoire par le biais d’une nouvelle thèse.
Sécuriser la route pour les cyclistes
Pour la suite de sa carrière, le chercheur souhaite revenir sur terre. Son projet? Aider les personnes qui n’osent pas rouler à vélo en ville à franchir le pas. En équipant un vélo avec les capteurs miniaturisés adaptés pour les drones, et en les complétant de capteurs de bruit et de qualité de l’air, il souhaite cartographier le trafic urbain et quantifier les dangers potentiels auxquels les cyclistes sont exposés, afin d’adapter de manière ciblée les infrastructures routières ainsi que des campagnes de prévention dans l’Ouest lausannois. À suivre.
Emmanuel Cledat, “On the adjustment, calibration and orientation of drone photogrammetry and laser-scanning”, thèse sous la direction de Jan Skaloud et Davide Antonio Cucci, EPFL, mai 2020.
Emmanuel Cledat, Davide Antonio Cucci, Jan Skaloud, “Camera calibration models and methods in corridor mapping with UAVs”, ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XLIII, 2020.
E. Cledat, J. Skaloud, “Fusion of Photo with Airborne Laser Scanning” ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XLIII, 2020.
E. Cledat, D. A. Cucci, “Mapping GNSS restricted environments with a drone tandem and indirect position control” ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, vol. IV-2/W3, pp. 1–7, 2017.
Images à télécharger