Un fauteuil roulant robotisé qui côtoie la foule de manière plus sûre
Faire circuler un robot dans une foule en toute sécurité? Dans le cadre du projet européen CrowdBot, des chercheurs de l’EPFL explorent les aspects techniques, éthiques et sécuritaires d’un tel scénario, qui pourrait notamment permettre d’aider un jour les personnes à mobilité réduite.
Depuis quelques temps, une machine à mi-chemin entre le robot et le fauteuil roulant s’invite sur le marché du samedi matin en plein cœur de Lausanne. Ce dispositif permet aux scientifiques du Laboratoire d’algorithmes et de systèmes d’apprentissage (LASA) de l’EPFL de réaliser des recherches dans le cadre de CrowdBot, un consortium réunissant sept organisations, coordonné par l’INRIA et financé par le programme européen ICT H2020.
Le but de ce projet est d’étudier la faisabilité, d’un point de vue technique et éthique, de faire évoluer toute sorte de robots mobiles au sein d’environnements bondés. Les recherches sont menées tant sur des robots humanoïdes que sur des robots de service ou des robots d’assistance. «Nous parlons beaucoup des véhicules autonomes mais pas tellement des robots qui sont déployés aux côtés des piétons», expose Aude Billard, Directrice du LASA à l’EPFL. «Ceux-ci doivent clairement se mêler à la foule, d’où la nécessité de se pencher sur ce que cela implique».

Multiplier les scénarios
Parmi les questions que posent la navigation des robots dans la foule, celles liées à la sécurité de l’utilisateur et des personnes à proximité sont cruciales. Les chercheurs du LASA ont constaté un vide dans la législation actuelle et se sont penchés sur les risques potentiels impliqués, l’un d’eux étant les collisions avec les piétons.
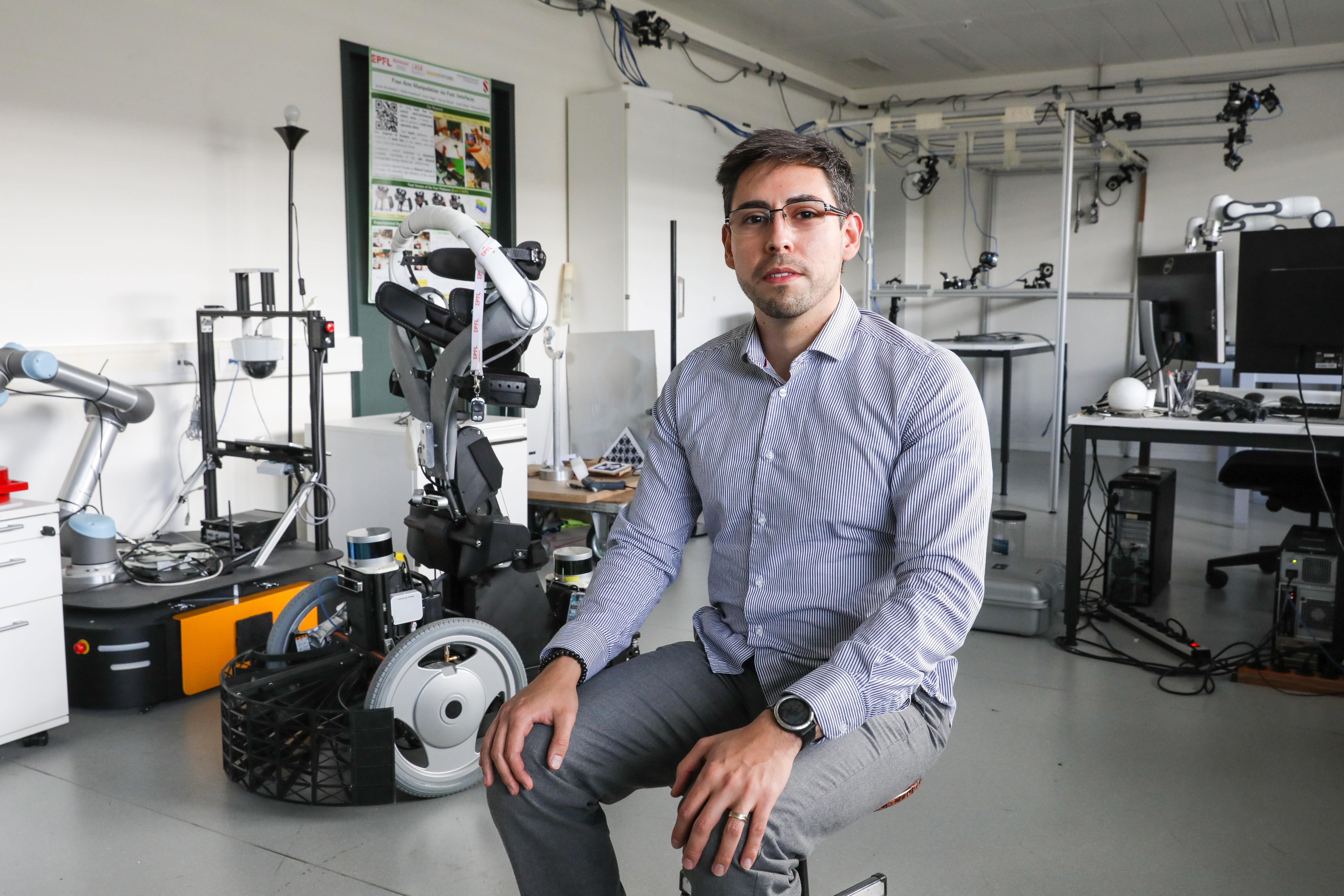
L’heureux élu pour aider les chercheurs à mesurer ces risques s’appelle Qolo, pour Quality of Life with Locomotion. Ce robot, initialement développé à l’Université de Tsukuba (Japon), est destiné aux personnes à mobilité réduite. Il combine des roues motrices actives et un exosquelette passif qui permet à l’utilisateur de passer facilement de la position assise à la position debout.
C’est donc accompagnée de Qolo que l’équipe du LASA s’est rendue à Berne afin de réaliser des crash tests. «Nous avons utilisé deux types de mannequins, car l’impact n’est pas le même selon la taille de la personne», explique Diego Paez, chercheur post-doctorant au LASA. «Chez un enfant, la zone la plus vulnérable sera la tête, chez une femme enceinte, ce sera le ventre». Les scientifiques ont pu observer que même à faible vitesse, en dessous de 6 km/h, les blessures peuvent être importantes. Ce qui rend leur prévention d’autant plus cruciale.
Navigation active
Afin que Qolo soit conscient de l’environnement dans lequel il évolue et qu’il puisse réagir à celui-ci, des adaptations ont été nécessaires. Ainsi, les chercheurs lui ont ajouté un ensemble de capteurs, dont un lidar (laser) à l’avant et un à l’arrière, ainsi que des caméras à l’avant. «Cette vision à 360 degrés de l’environnement lui permet de repérer tout obstacle potentiel, tant ceux qui lui font face que ceux derrière lui. Savoir ce qu’il y a dans le dos du robot est important pour planifier des manœuvres d’évitement qui peuvent impliquer de reculer», explique Diego Paez, chercheur post-doctorant au LASA. «Tandis que les Lidars détectent tous les obstacles, les caméras permettent de vérifier si ces derniers sont des piétons».
Un pare-chocs, placé à l’avant, vient compléter la panoplie. «Grâce à ça, Qolo sait qu’il est en contact avec quelqu’un et peut mesurer ce contact afin de maintenir une force maximale très faible et continuer à naviguer», souligne Diego Paez. Le robot n’est donc pas programmé pour s’arrêter en cas de collision mais pour contourner le problème. «Un arrêt net en plein milieu d’une foule pourrait être pire pour la sécurité des personnes à proximité».
Ces composants sont couplés à des algorithmes de détection et de suivi des personnes, qui servent à estimer combien de piétons sont présents et quels sont leurs mouvements. Le LASA a développé un algorithme de navigation qui permet au robot de prendre une décision en quelques millisecondes quant à la meilleure direction à emprunter, ce qui permet de réagir rapidement dans une foule dense.
Anticiper des comportements imprévisibles
Malgré les prouesses dont sont capables les robots, ceux-ci ne peuvent pas vraiment (encore) anticiper nos comportements comme un soudain changement de trajectoire. «Nous ne pouvons pas simuler ce que les gens font dans différentes situations, car chaque personne est unique et réagit différemment, d’où l’importance de confronter le dispositif à la vraie vie», explique Diego Paez. Pour ceci, l’équipe se rend au centre-ville de Lausanne les jours de marché.

Cette mise en situation permet aux scientifiques de tester le dispositif complet du robot, des composants techniques aux algorithmes, en passant par l’utilisateur. Les premières observations sont positives, puisque les piétons semblent se comporter normalement à proximité de Qolo; un plus pour les données récoltées. «Nous devons encore analyser les résultats mais il semble que l’aspect semi-autonome du robot fonctionne bien», se réjouit Diego Paez. Aude Billard précise: «La personne qui conduit Qolo décide, grâce à ses mouvements de torse, dans quelle direction aller mais s’il y a soudainement un obstacle, le dispositif peut s’adapter et l’éviter. Pour une personne à mobilité réduite, une telle conduite assistée présente de nombreux avantages».
Susciter une prise de conscience
Alors que le domaine de la robotique ne cesse d’évoluer, il se peut que nous croisions de plus en plus souvent des robots sur notre route ou sur nos trottoirs, à l’instar des robots-livreurs. Les chercheurs appellent donc à une prise de conscience : il est capital de développer des moyens de minimiser les risques causés par ces interactions. «Les crash tests montrent qu’il existe des probabilités importantes de blessures, qui dépassent même les standards utilisés pour les voitures», avance Diego Paez.
«Nous devons désormais travailler sur un système de contrôle qui mitige ces risques, que ce soit en termes de réduction de la vitesse ou d’absorption du choc, conclut Aude Billard. Aussi, il est crucial de mettre ces résultats en évidence afin qu’une législation adaptée soit mise en place. Ceci peut par exemple impliquer d’imposer une vitesse de croisière maximum aux robots d’assistance tels que Qolo ou de limiter le transit de certains véhicules, comme les robots-livreurs, au sein de certaines zones densémment fréquentées».
Paez-Granados, D., Billard, A. Crash test-based assessment of injury risks for adults and children when colliding with personal mobility devices and service robots. Nature Scientific Reports 12, 5285 (2022). https://doi.org/10.1038/s41598-022-09349-9
D. J. Gonon, D. Paez-Granados and A. Billard, "Reactive Navigation in Crowds for Non-Holonomic Robots With Convex Bounding Shape," in IEEE Robotics and Automation Letters, doi: 10.1109/LRA.2021.3068660
L. Huber, A. Billard and J. Slotine, "Avoidance of Convex and Concave Obstacles With Convergence Ensured Through Contraction," in IEEE Robotics and Automation Letters, doi:10.1109/LRA.2019.2893676
D. Paez-Granados, H. Kadone, M. Hassan, Y. Chen, & K. Suzuki, (2022). Personal Mobility with Synchronous Trunk-Knee Passive Exoskeleton: Optimizing Human-Robot Energy Transfer. IEEE/ASME Transactions on Mechatronics,1 (1), 1–12. DOI: 10.1109/TMECH.2021.3135453
Images à télécharger