Un drone inspiré des insectes se déforme pour absorber les chocs

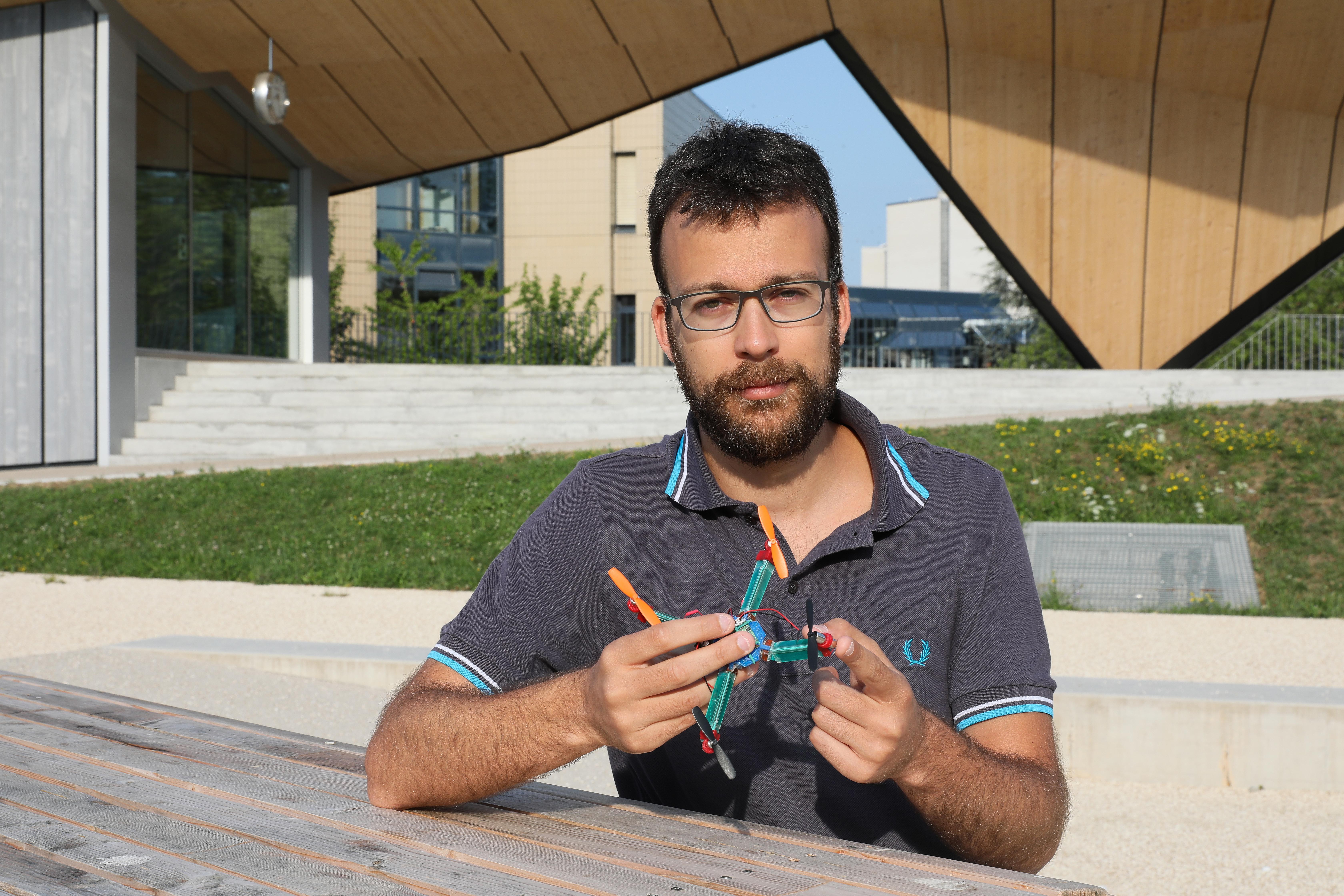
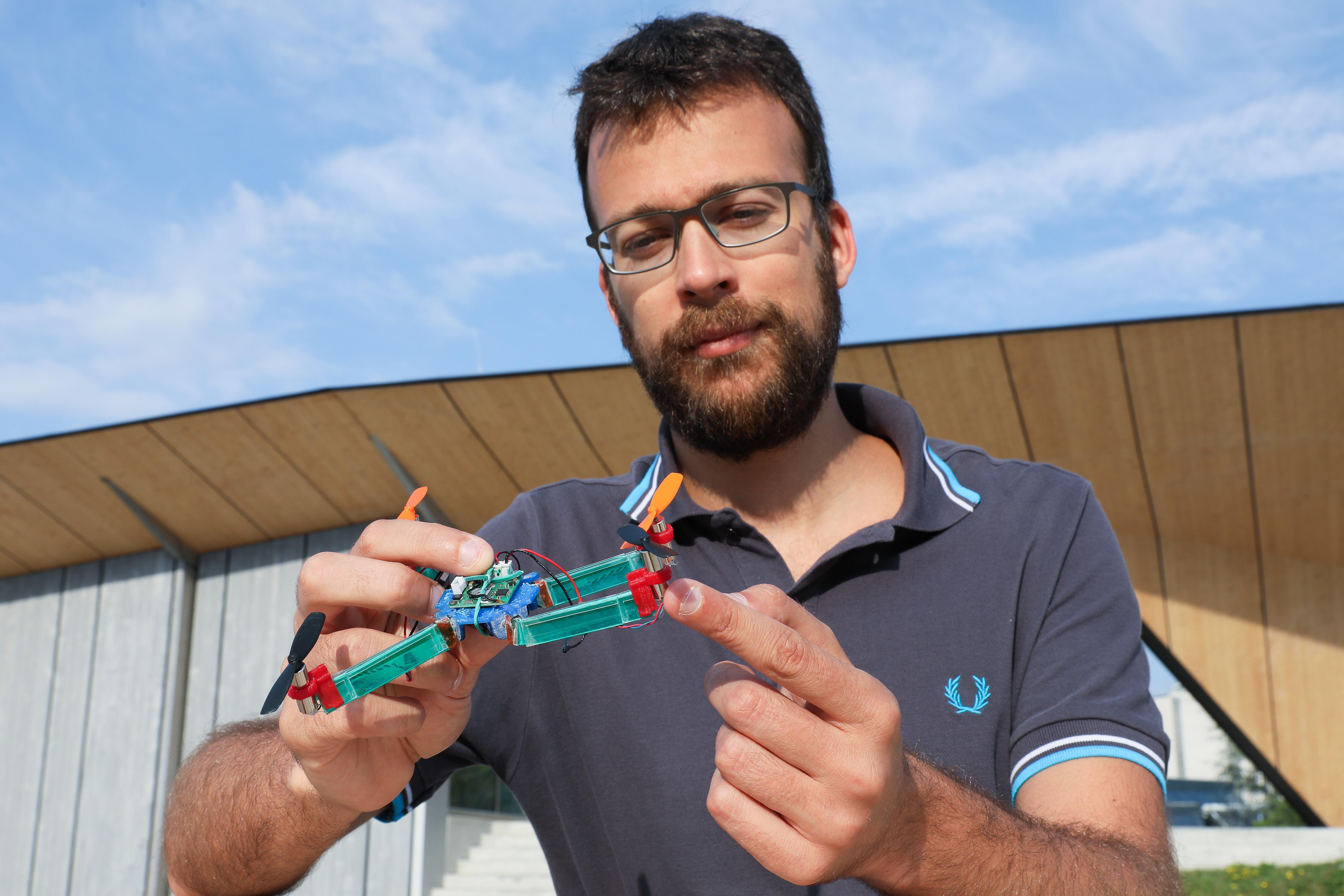
The hybrid origami drone can be stiff or flexible depending on the circumstances© Alain Herzog / 2018 EPFL
Inventé à l’EPFL, un drone origami est capable, lors de collisions, de se ramollir pour éviter la casse, puis de revenir à sa forme initiale. Inspiré des ailes d’insecte, ce nouveau type de drone réunit les avantages des structures souples et rigides.
Depuis plusieurs années, les roboticiens s’inspirent des origamis- pliages traditionnels japonais- pour fabriquer des robots et des drones légers et pliables, avec des propriétés extrêmement innovantes. Jusqu’ici, deux types de structures origamis ont prévalu. Les structures rigides, capables de supporter un certain poids, mais se rompant en cas de charge trop lourde, et les structures flexibles et résilientes, ne pouvant pratiquement pas supporter de charge.
A l’EPFL, des chercheurs ont développé un drone origami hybride inspiré des ailes d’insecte, qui peut être rigide ou souple en fonction des besoins. Lors du vol, le drone présente un état rigide, pour soutenir le poids de sa structure, et résister aux poussées provoquées par les hélices. Mais en cas de collision, il est capable de se ramollir pour absorber le choc. Cette faculté de déformation permet de limiter au maximum les dégâts matériels. Menée au sein du Laboratoire de systèmes intelligents, dirigé par Dario Floreano, la recherche est publiée dans Science Robotics.
Une fabrication en sandwich
Le drone doit sa résistance à sa construction particulière en couches rigides et élastomères. Une membrane en élastomère est étirée, puis placée en sandwich entre des plaquettes rigides. Quand le système est au repos, les plaquettes sont maintenues ensemble, et confèrent une rigidité à la structure. En revanche, si une force d’une intensité suffisante est exercée, les plaquettes s’écartent et la structure peut se plier.
«Durant la fabrication, nous pouvons encoder différentes propriétés mécaniques dans le drone», explique Stefano Mintchev, premier auteur de l’étude. «Il est possible de décider du moment de la transition entre l’état rigide et souple, par exemple». Autre avantage, en le repliant sur lui-même, le drone emmagasine de l’énergie potentielle élastique, qui lui permet de s’auto-déployer au moment souhaité.
La faculté de programmer des structures à la fois rigides et souples ouvre la porte à des applications diverses. En parallèle au développement de leur drone, les chercheurs ont utilisé cette technique pour fabriquer une pince au toucher délicat. Passé une certaine pression, la pince se ramollit, évitant de briser l’objet à saisir. De la même façon, le système empêche la pince d’emporter une charge trop lourde par rapport à sa capacité.
«La tendance en robotique est de fabriquer des robots plus «soft», adaptables et pouvant côtoyer l’humain de manière sûre. Or pour certaines applications, une certaine rigidité est nécessaire», explique Dario Floreano. «Avec notre système, nous avons démontré qu’il était possible de concilier les deux états».
Réference: Stefano Mintchev, Jun Shintake, Dario Floreano, “Bioinspired dual-stiffness origami,” Science Robotics http://robotics.sciencemag.org/lookup/doi/10.1126/scirobotics.aau0275
Liens
Images à télécharger