Robotic Fingers with a Gentle Touch

© 2016 EPFL
Soft electronics are changing the way robots can touch. EPFL Scientists have developed a new soft robotic gripper -- made out of rubber and stretchable electrodes -- that can bend and pick up delicate objects like eggs and paper, taking robotics to a whole new level.
Have you ever rubbed a balloon in your hair to make it stick to the wall? This electrostatic stickiness called electroadhesion may change robotics forever.
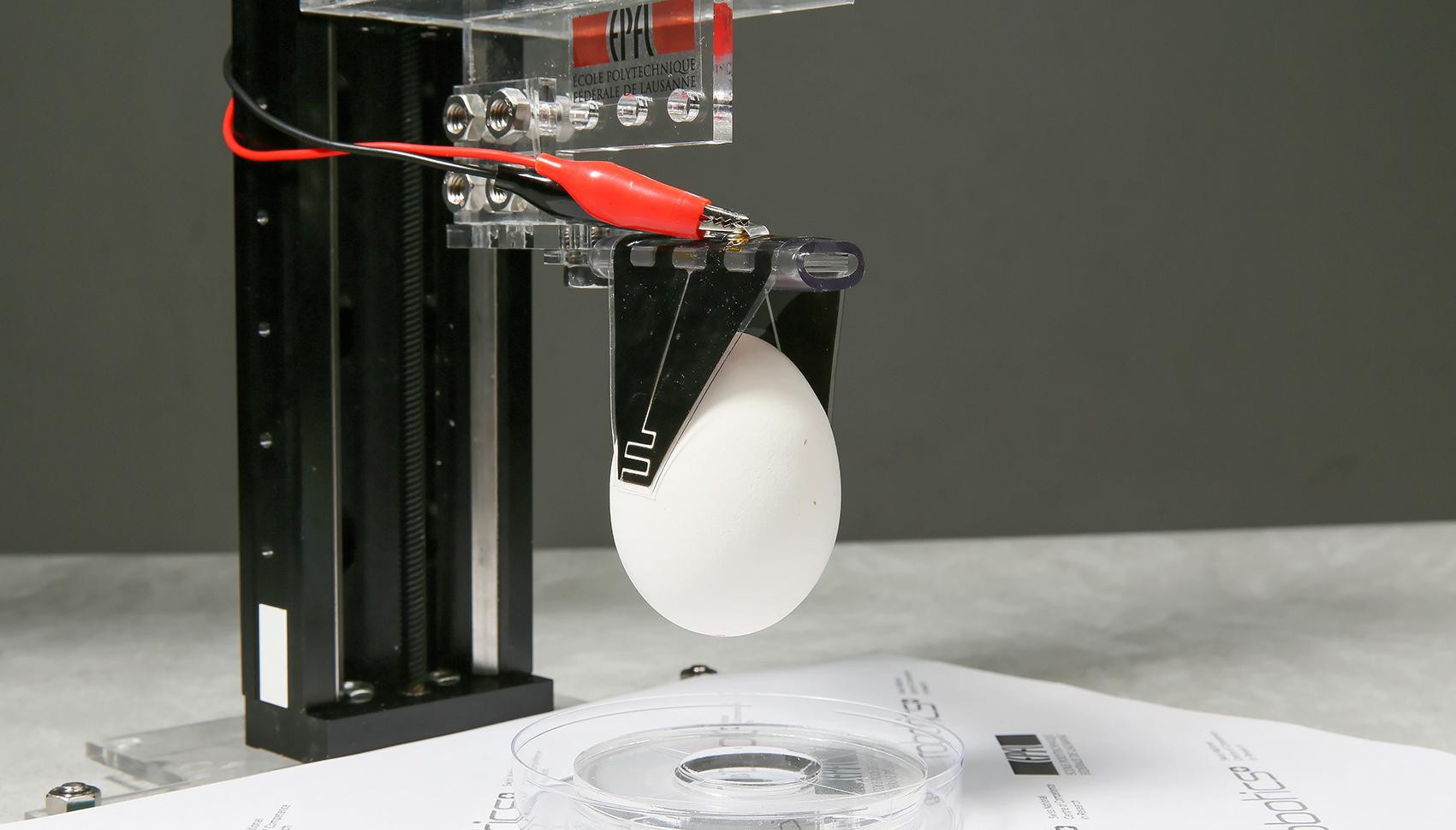
EPFL scientists have invented a new soft gripper that uses electroadhesion: flexible electrode flaps that act like a thumb-index gripper. It can pick up fragile objects of arbitrary shape and stiffness, like an egg, a water balloon or paper.
This lightweight gripper may soon be handling food for the food industry, capturing debris in outer space or incorporated into prosthetic hands. The research, which was funded by NCCR Robotics, is featured in Advanced Materials.
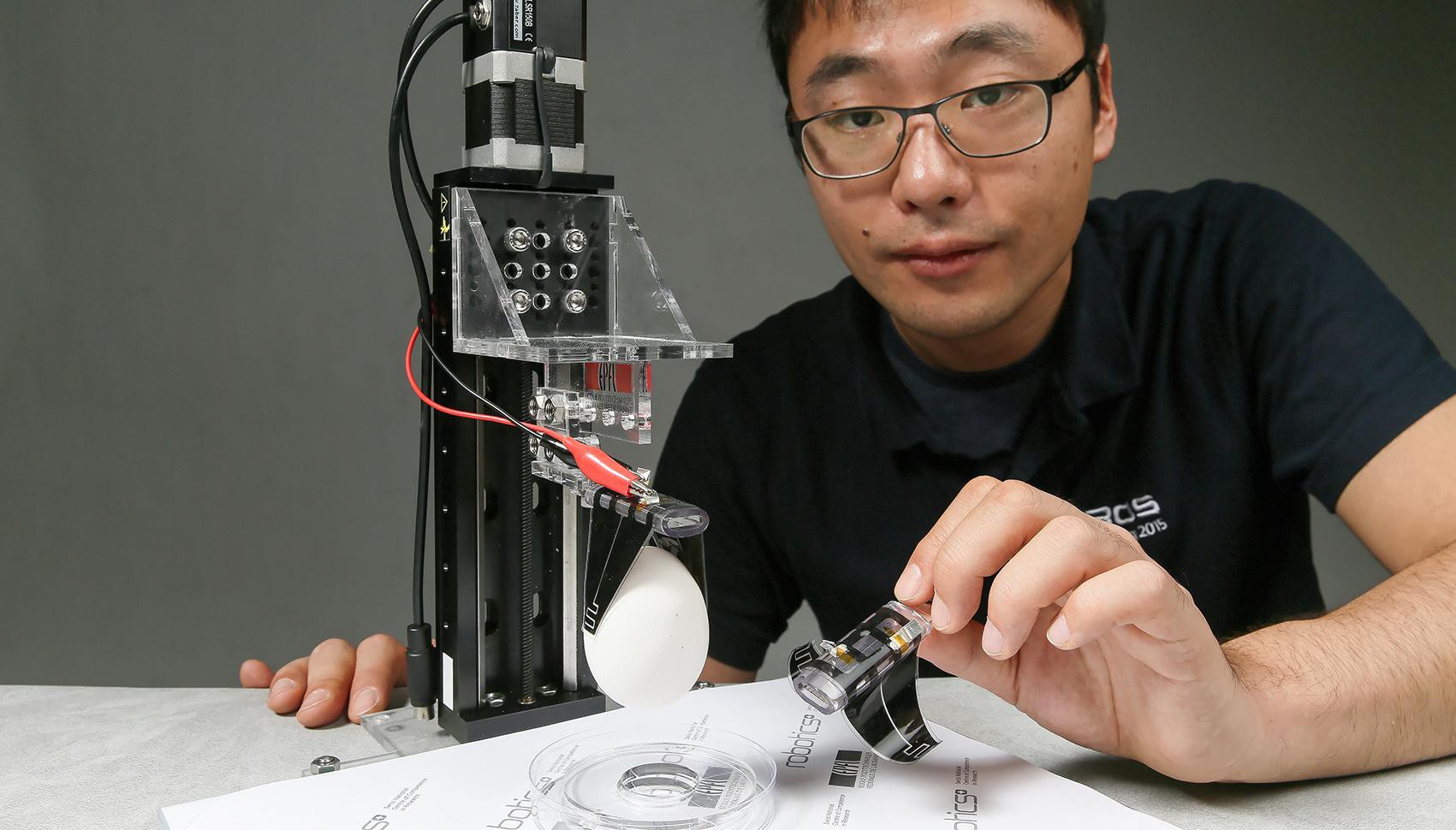
"This is the first time that electroadhesion and soft robotics have been combined together to grasp objects," says Jun Shintake, doctoral student at EPFL and first author of the publication.
When the voltage is turned on, the electrodes bend towards the object to be picked up, imitating muscle function. The tip of the electrodes act like fingertips that gently conform to the shape of the object, gripping onto it with electrostatic forces in the same way that the balloon sticks to the wall. These electrodes can carry 80 times its own weight and no prior knowledge about the object's shape is necessary.

In comparison, other soft grippers are either pneumatically controlled or fail at picking up fragile objects without telling the gripper beforehand about the object's shape. They also have been unable able to handle flat or deformable objects.
“The novelty of our soft gripper is the ideal combination of two technologies: artificial muscles and electroadhesion,” says PhD co-supervisor Dario Floreano of EPFL. "Our unique configuration of electrodes and silicone membranes is what allows us to control the bending of the flaps and the electrostatic grip," adds PhD co-supervisor Herbert Shea of EPFL.
How it mimics muscle function and grips onto objects
The electrode flaps consist of 5 layers: a pre-stretched elastomer layer sandwiched between two layers of electrodes, plus two outer layers of silicone of different thickness. When the voltage is off, the difference in thickness of the outer layers makes the flaps curl outwards. When the voltage is on, the attraction between the two layers of electrodes straightens out the membranes. This straightening of the membranes from a curled position mimics muscle flexion.
At the tips of the flaps, the electrodes of each layer are designed for optimal electrostatic grip. These interdigitated electrodes, which look like two combs fitted together, create an electrostatic field that causes electroadhesion.
Links
Images to download