New and improved drone mapping software

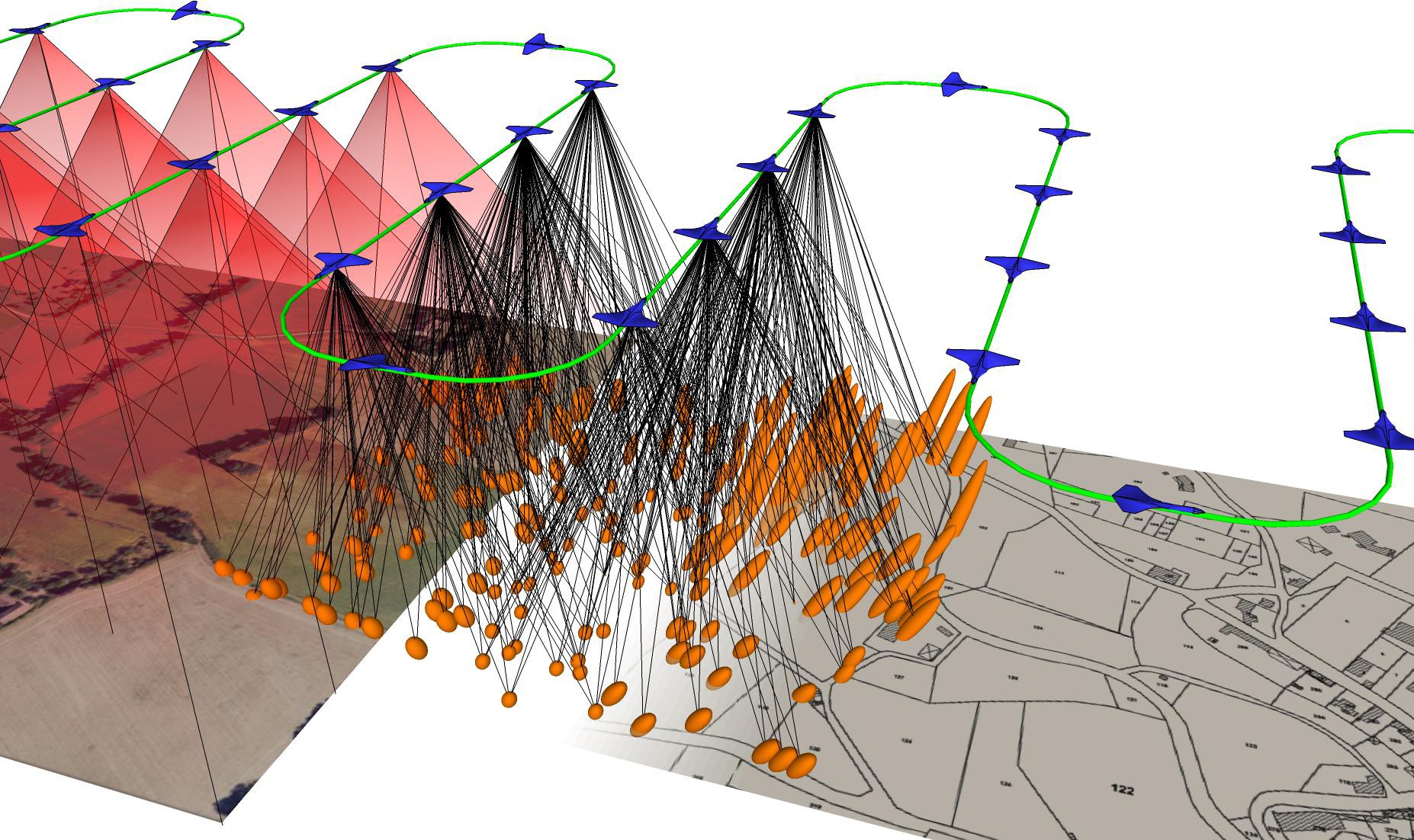
Drone-based aerial photogrammetry. © E.Cledat / TOPO / EPFL
For his thesis, an EPFL PhD student has enhanced the accuracy and reliability of drone mapping – a technique that is gaining traction across many sectors of society.
Making drone mapping more accurate is one of the goals of the Geodetic Engineering Laboratory (Topo), which is run by Bertrand Merminod within EPFL's School of Architecture, Civil and Environmental Engineering (ENAC). Drones are not only toys for big and little kids – they also serve many practical purposes. They can be used to monitor dams and railroads in order to prevent accidents, or to create 3D digital copies of historical monuments in case they are accidentally or deliberately destroyed. They can also capture images from one season to the next in order to measure soil erosion.
"It's very important to be as accurate as possible," says Emmanuel Cledat, who has just completed his PhD thesis at the Topo lab. "When it looks like a cliff has moved slightly over the winter, you have to be able to tell whether it’s a real topographical change or just a georeferencing error.” Cledat has spent the last four years developing software capable of accurately processing data acquired by sensors embedded on drones. He received the Best Young Author Award 2020 from the International Society for Photogrammetry and Remote Sensing (ISPRS) for an article about his thesis project.
Planes and helicopters used for mapping are generally equipped with four types of sensor: a GPS (or GNSS) and an inertial measurement unit (IMU), which determine the vehicle’s position and orientation; a camera; and a LIDAR laser scanner, which measures distances by recording the time it takes for the laser beam to travel from the scanner to the object and back again.
A miniaturized, hybrid device
Until recently, LIDAR laser scanners could weigh up to 10 kilos. The Topo lab, together with EPFL spin-off Helimap System SA, were pioneers in developing aerial mapping systems involving helicopters, which can carry heavy equipment like a LIDAR scanner and a navigation-grade IMU. But in recent years, both industry professionals and researchers have been focused on making these measuring devices much smaller. Cledat was able to hybridize the data acquired by miniaturized sensors embedded on a drone (a GNSS, LIDAR, IMU and camera) such that the resulting map is almost as accurate as those obtained with a helicopter. A drone-based mapping technique is a greener alternative and one more suited to hard-to-reach terrain.
As part of his thesis, Cledat carefully calibrated each sensor to make them as effective and reliable as possible. To do this, he used the lab's calibration fields near Vufflens-la-Ville in Vaud Canton. He earned the ISPRS award for his work on camera calibration. The bundle adjustment software he developed is used to cross-check the measurements in order to correct them all simultaneously. This results in an accurate image of the area and of the drone's position and orientation. Cledat's software will be further developed within the lab as part of another thesis project.
Cledat plans to return to earth for the next step in his career. His upcoming project will help people who are wary of cycling around town. He wants to equip bikes with mini sensors made for drones, together with noise and air-quality sensors. He will use the data collected to map out city traffic and quantify potential risks for cyclists so that road infrastructure and local road safety campaigns can be adjusted accordingly. Watch this space.
Emmanuel Cledat, “On the adjustment, calibration and orientation of drone photogrammetry and laser-scanning,” thesis under the supervision of Jan Skaloud and Davide Antonio Cucci, EPFL, May 2020.
Emmanuel Cledat, Davide Antonio Cucci, Jan Skaloud, “Camera calibration models and methods in corridor mapping with UAVs,” ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XLIII, 2020.
E. Cledat, J. Skaloud, “Fusion of Photo with Airborne Laser Scanning,” ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, XLIII, 2020.
E. Cledat, D. A. Cucci, “Mapping GNSS restricted environments with a drone tandem and indirect position control,” ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences, vol. IV-2/W3, pp. 1–7, 2017.
Images to download