Mori3 : Un robot polymorphe pour les voyages spatiaux
Jamie Paik et son équipe de chercheurs à la Faculté des sciences et techniques de l’ingénieur ont créé un robot origami capable de changer de forme, de se déplacer et d'interagir avec des objets et des personnes.
En combinant l'inspiration du monde numérique du maillage polygonal et du monde biologique du comportement en essaim, le robot Mori3 peut se métamorphoser de triangles en 2D en presque n'importe quel objet en 3D. Les recherches de l'EPFL, publiées dans Nature Machine Intelligence, montrent les avantages de la robotique modulaire pour les voyages spatiaux. « Notre objectif avec Mori3 est de créer un robot modulaire semblable à un origami, pouvant être assemblé et désassemblé à volonté en fonction de l'environnement et de la tâche à accomplir », déclare Jamie Paik, directrice du laboratoire de robotique reconfigurable. « Mori3 peut changer de taille, de forme et de fonction ».
Un robot polygone
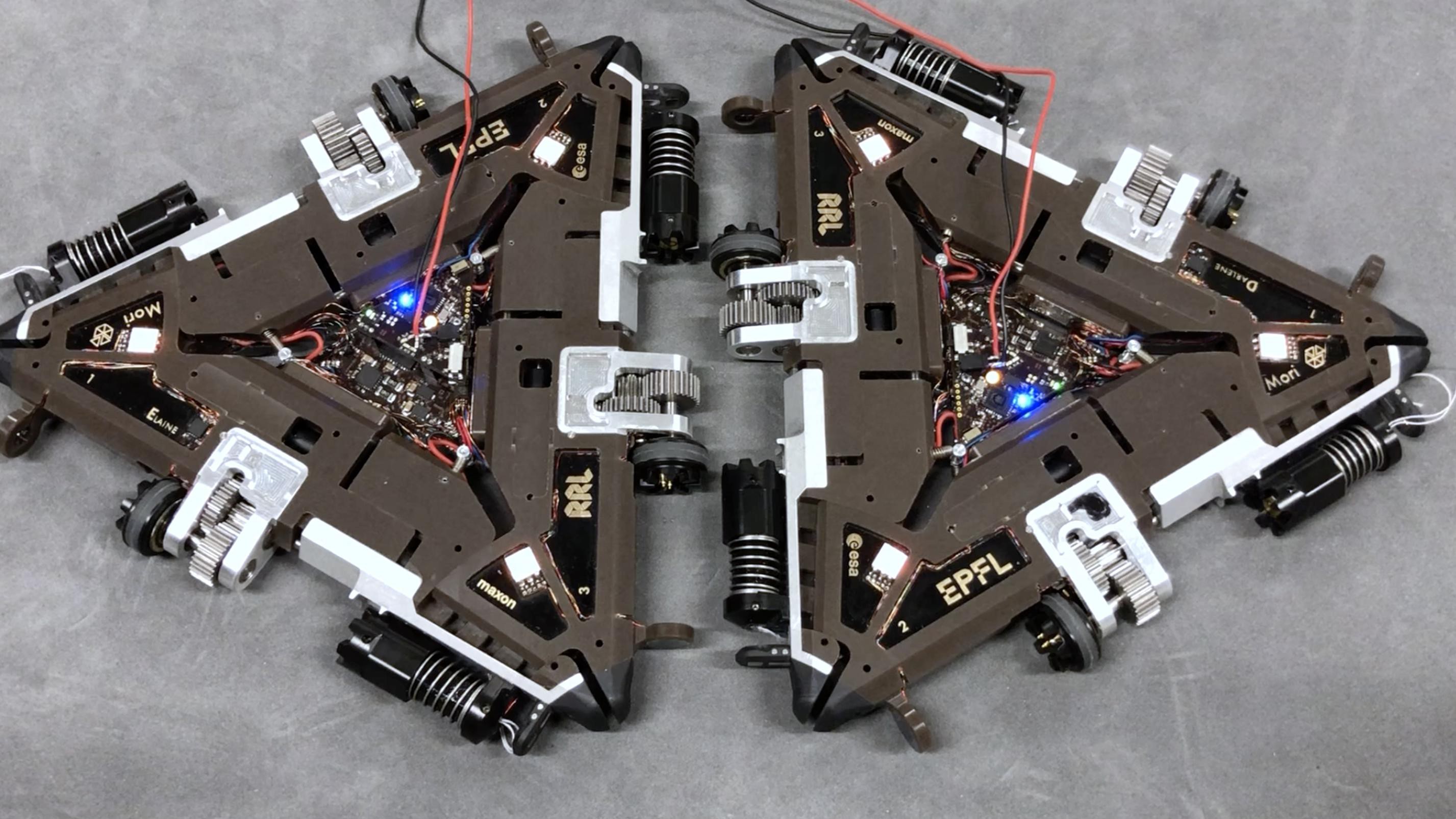
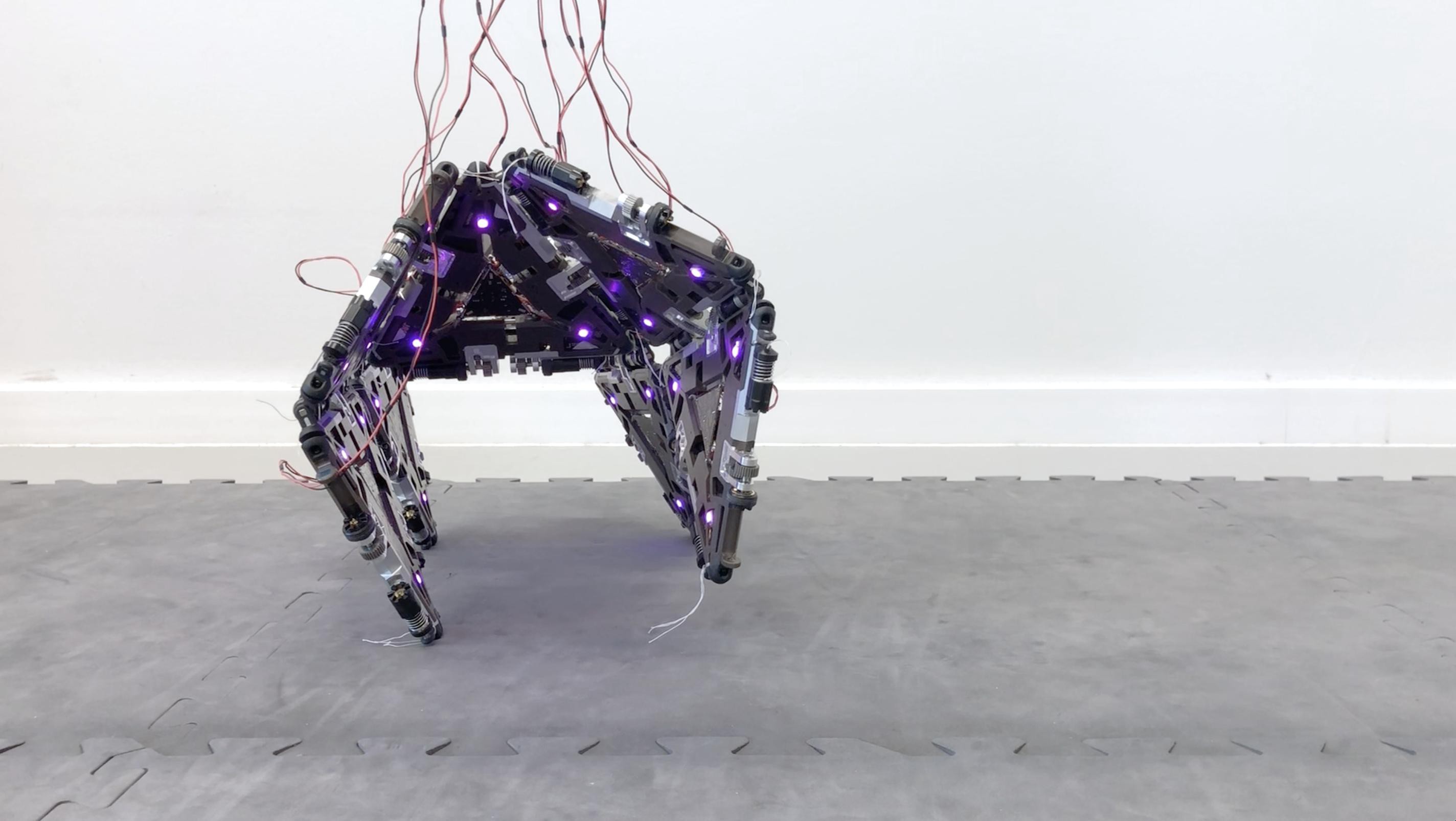
Les modules individuels du robot Mori3 sont de forme triangulaire. Les modules s'assemblent facilement pour former des polygones de différentes tailles et configurations dans un processus appelé maillage polygonal. « Nous avons démontré que le maillage polygonal est une stratégie robotique viable », déclare Christoph Belke, chercheur postdoctoral en robotique. Pour y parvenir, l'équipe a dû repousser les limites de divers aspects de la robotique, notamment la conception mécanique et électronique, les systèmes informatiques et l'ingénierie. « Nous avons dû repenser notre compréhension de la robotique », explique Belke. « Ces robots peuvent changer leur propre forme, se connecter les uns aux autres, communiquer et se reconfigurer pour former des structures fonctionnelles et articulées ». Cette preuve de concept est un succès car les robots Mori3 sont capables de faire les trois choses que les robots devraient être capables de faire : se déplacer, manipuler et transporter des objets, et interagir avec les utilisateurs.
Destinés à l'espace

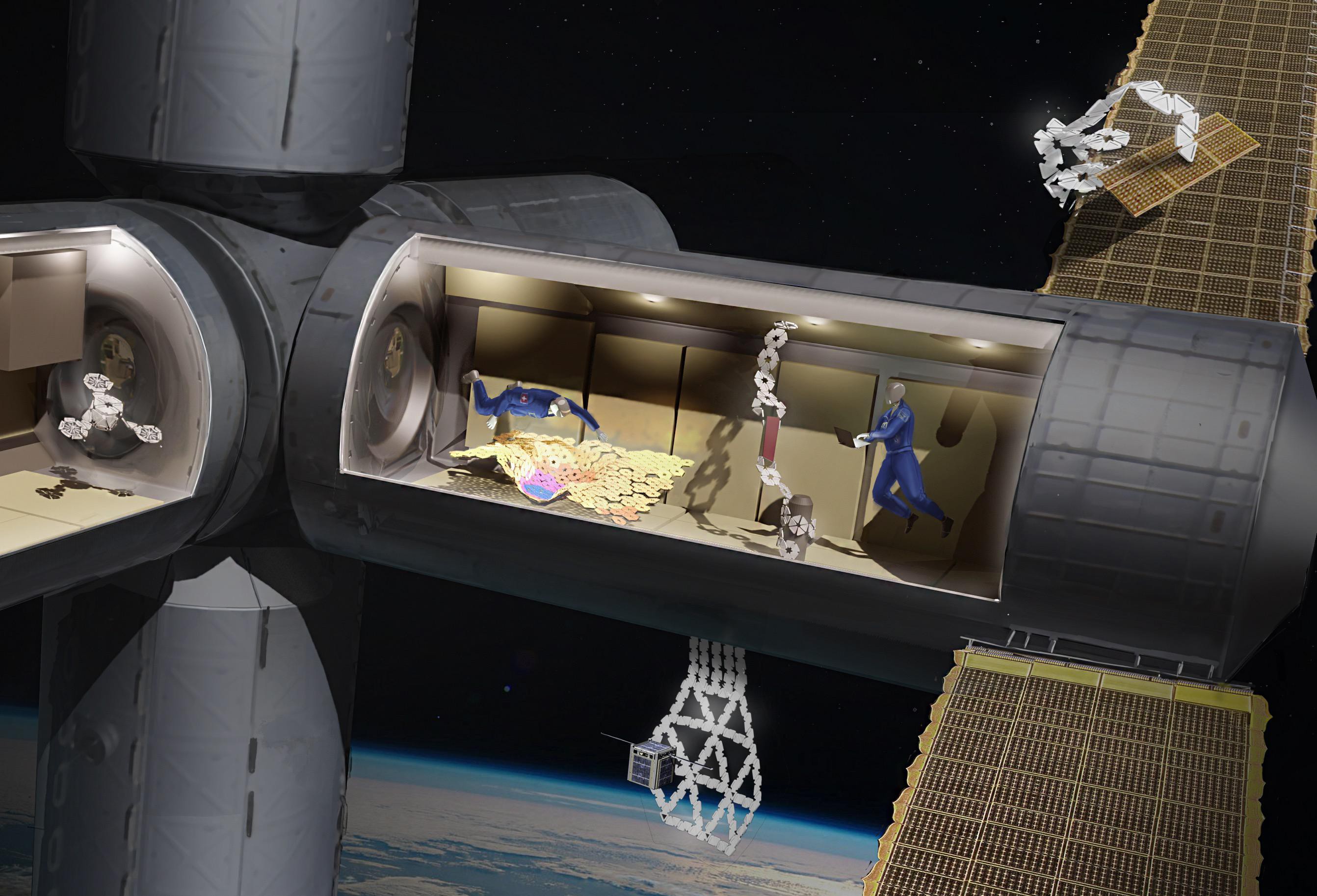
Quel est l'avantage de créer des robots modulaires et multifonctionnels ? Paik explique que pour accomplir une large gamme de tâches, les robots doivent être capables de changer leur forme ou leur configuration. « Les robots polygonaux et polymorphes qui se connectent les uns aux autres pour former des structures articulées peuvent être utilisés efficacement dans diverses applications », dit-elle. « Bien sûr, un robot polyvalent comme Mori3 sera moins performant que des robots spécialisés dans certains domaines. Cependant, le plus grand atout de Mori3 est sa polyvalence ». Les robots Mori3 ont été conçus en partie pour être utilisés dans les vaisseaux spatiaux, qui n'ont pas la place pour stocker différents robots pour chaque tâche individuelle à accomplir. Les chercheurs espèrent que les robots Mori3 seront utilisés à des fins de communication et de réparations externes.
Belke, C.H., Holdcroft, K., Sigrist, A. et al. Morphological flexibility in robotic systems through physical polygon meshing. Nat Mach Intell 5, 669–675 (2023). https://doi.org/10.1038/s42256-023-00676-8
Images à télécharger