Mori3: a polygon shapeshifting robot for space travel
Jamie Paik and her team of researchers at EPFL’s School of Engineering have created an origami-like robot that can change shape, move around and interact with objects and people.
By combining inspiration from the digital world of polygon meshing and the biological world of swarm behavior, the Mori3 robot can morph from 2D triangles into almost any 3D object. The EPFL research, which has been published in Nature Machine Intelligence, shows the promise of modular robotics for space travel. “Our aim with Mori3 is to create a modular, origami-like robot that can be assembled and disassembled at will depending on the environment and task at hand,” says Jamie Paik, director of the Reconfigurable Robotics Lab. “Mori3 can change its size, shape and function.”
A polygon robot
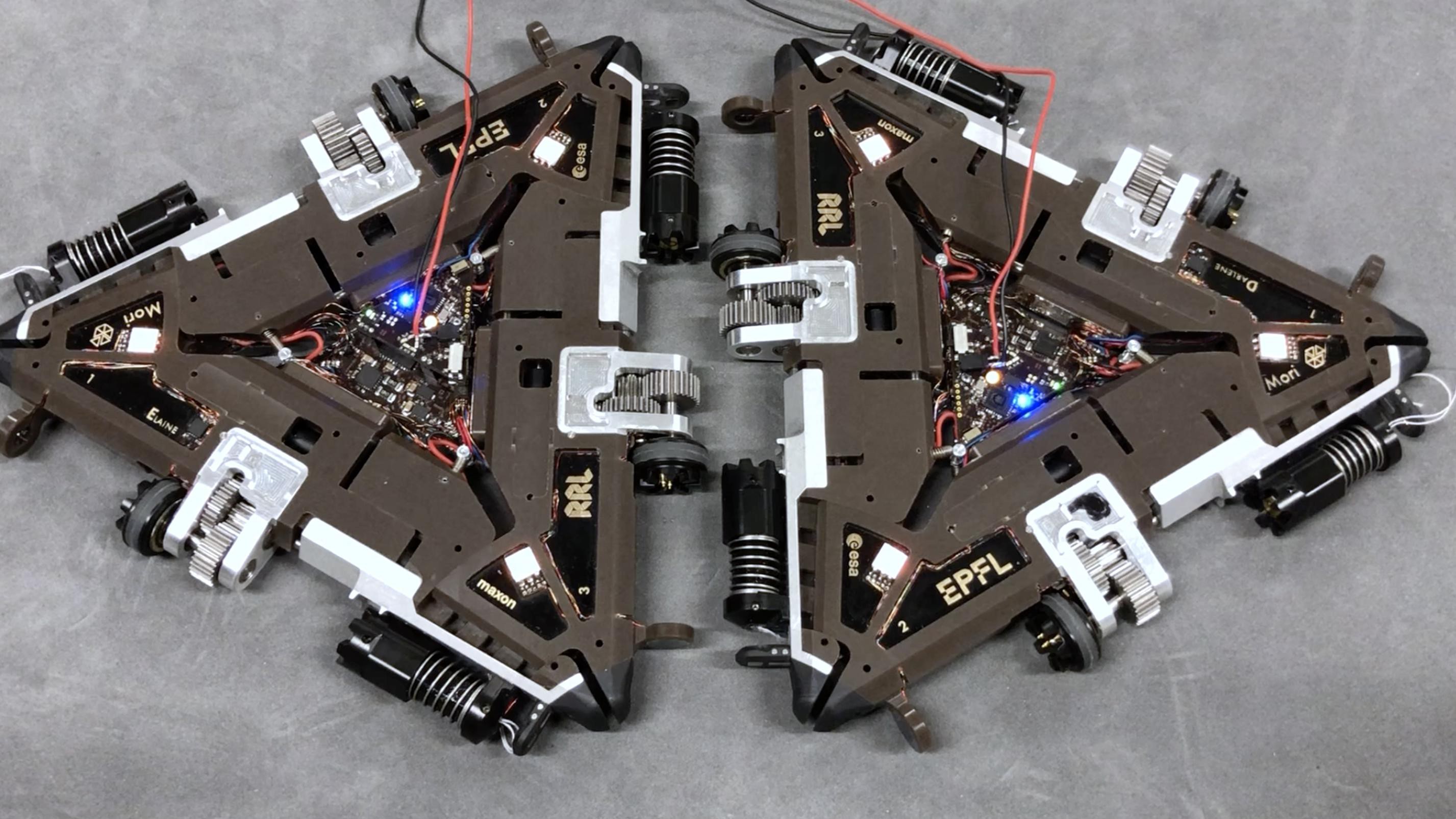
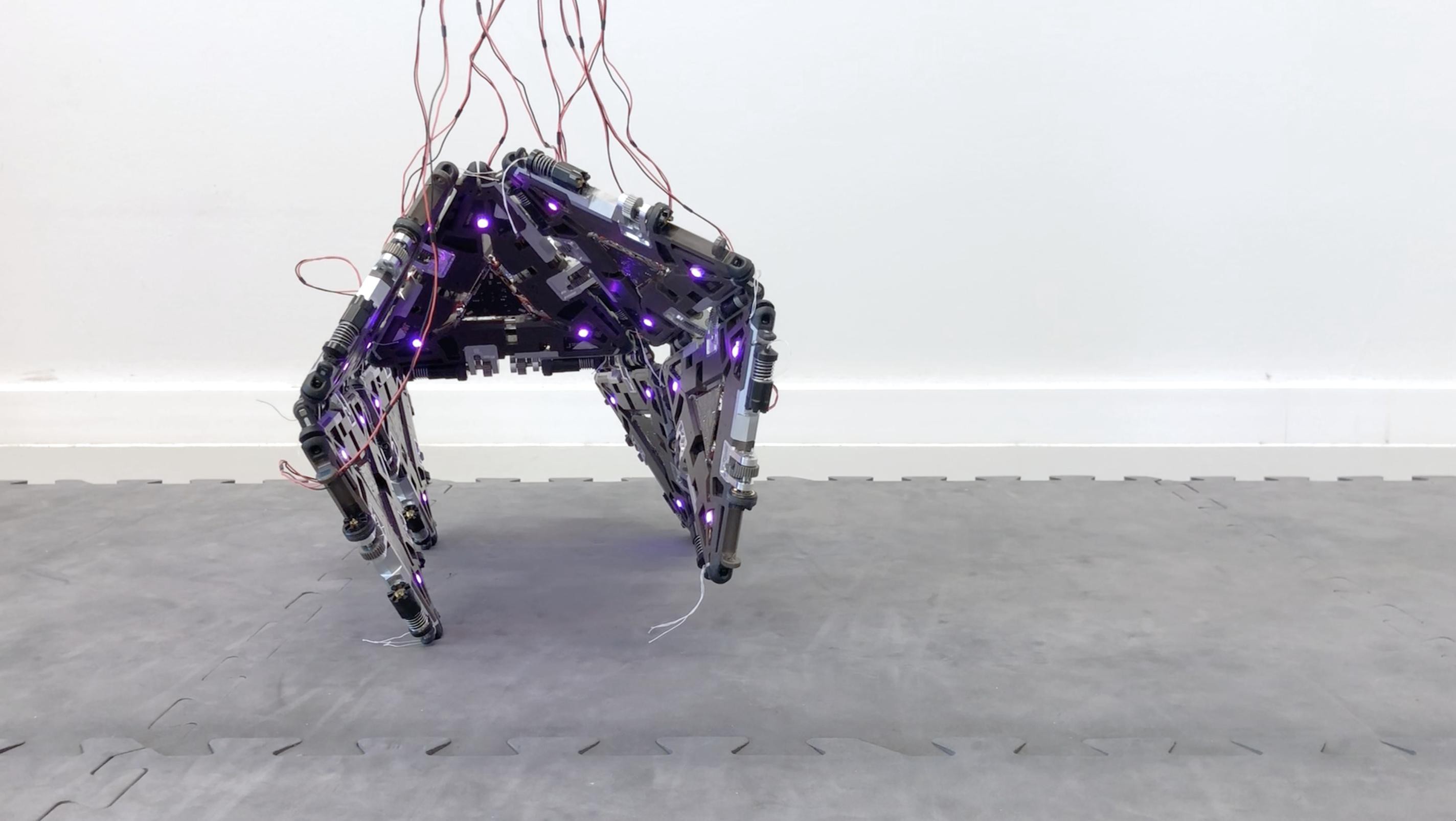
The individual modules of the Mori3 robot are triangular in shape. The modules easily join together to create polygons of different sizes and configurations in a process known as polygon meshing. “We have shown that polygon meshing is a viable robotic strategy,” says Christoph Belke, a Post-doctoral researcher in robotics. To achieve this, the team had to push the boundaries of various aspects of robotics, including the mechanical and electronic design, computer systems and engineering. “We had to rethink the way we understand robotics,” explains Belke. “These robots can change their own shape, attach to each other, communicate and reconfigure to form functional and articulated structures.” This proof of concept is a success as Mori3 robots are good at doing the three things that robots should be able to do: moving around, handling and transporting objects, and interacting with users.
Destined for space

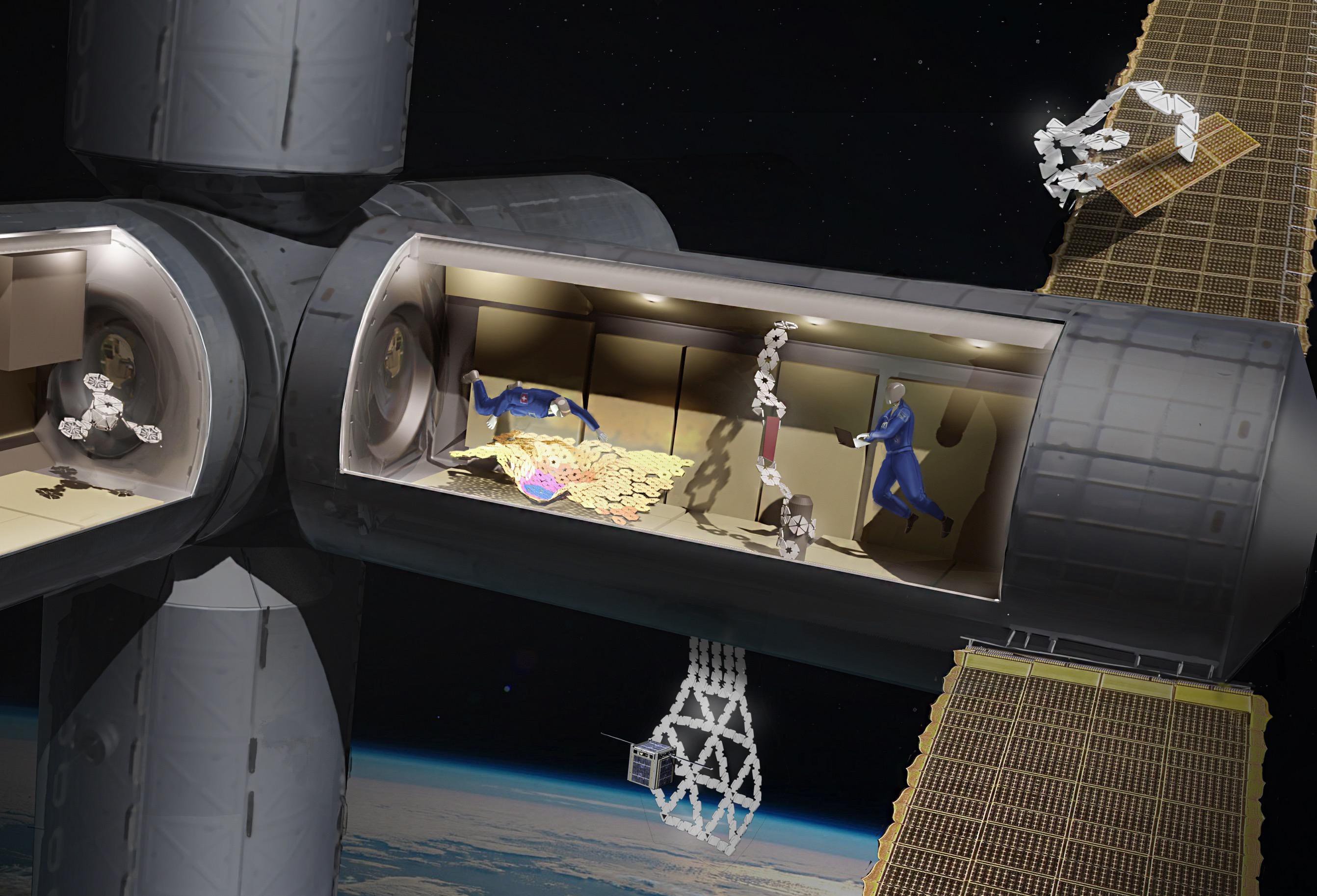
What is the advantage in creating modular and multi-functional robots? Paik explains that, to perform a wide range of tasks, robots need to be able to change their shape or configuration. “Polygonal and polymorphic robots that connect to one another to create articulated structures can be used effectively for a variety of applications,” she says. “Of course, a general-purpose robot like Mori3 will be less effective than specialized robots in certain areas. That said, Mori3’s biggest selling point is its versatility.” Mori3 robots were designed in part to be used in spacecraft, which don’t have the room to store different robots for each individual task that needs to be carried out. The researchers hope that Mori3 robots will be used for communication purposes and external repairs.
Belke, C.H., Holdcroft, K., Sigrist, A. et al. Morphological flexibility in robotic systems through physical polygon meshing. Nat Mach Intell 5, 669–675 (2023). https://doi.org/10.1038/s42256-023-00676-8
Images to download