La moto du futur n'aura pas besoin de pilote

© 2016 EPFL / Alain Herzog
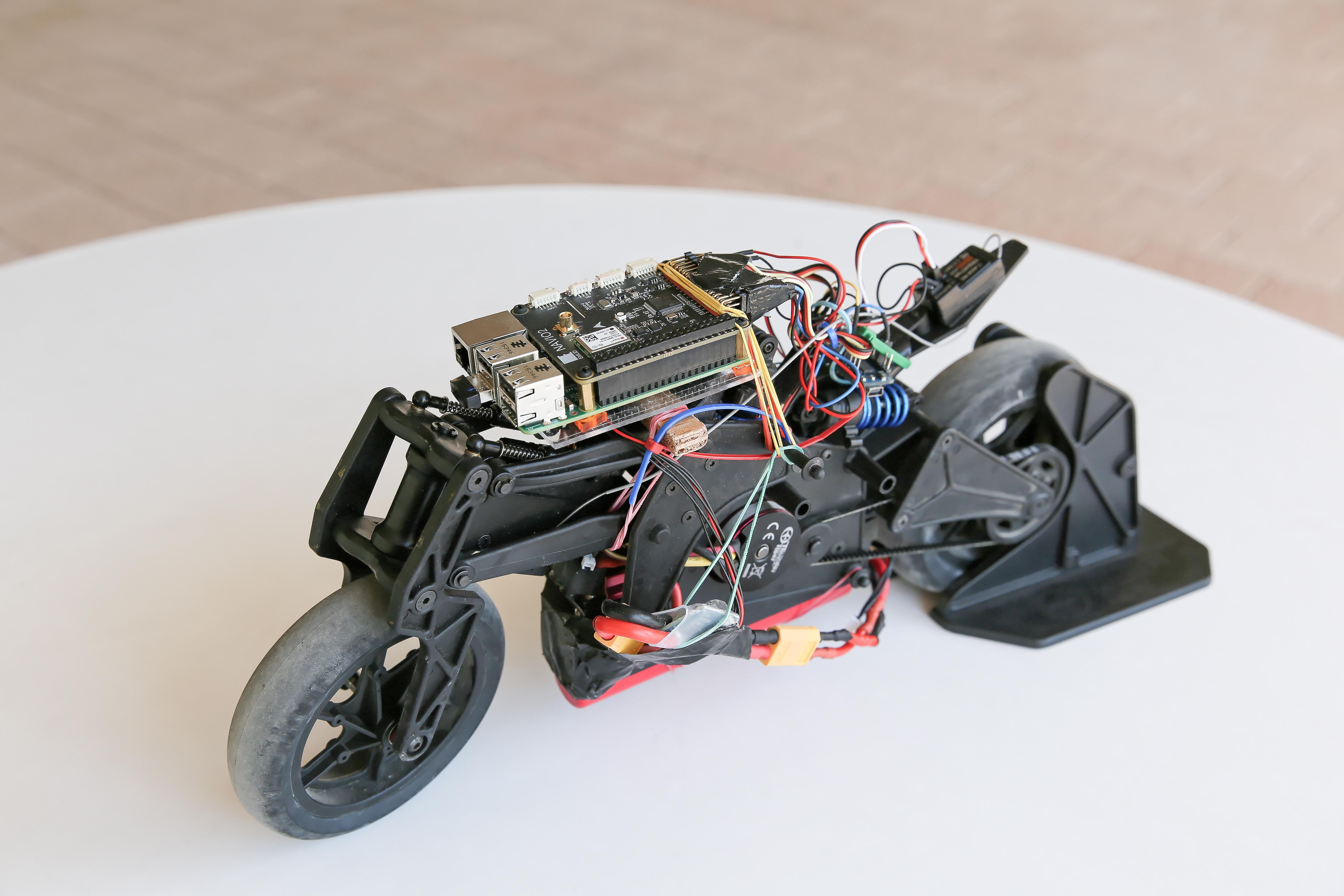
SÉRIE D’ÉTÉ –Étudiant en microtechnique, Eric Unnervik a développé une mini-moto capable de s’équilibrer d’elle-même. Objectif : mettre un jour au point un engin entièrement autonome, capable de faire mieux qu’un conducteur humain.
Verra-t-on bientôt des motos filer sur les routes sans pilote, comme les voitures de Google ? En tout cas, la technologie pour développer des motos autonomes existe déjà. Étudiant à l’EPFL en microtechnique, Eric Unnervik a développé une telle moto en miniature dans le cadre de son projet de Master, réalisé dans le laboratoire d’automatique du professeur Colin Jones.
L’engin réalise la jolie prouesse d’évoluer sans tomber à une vitesse de 60 km/h, sans intervention autre qu’une indication de direction. Si on est encore loin de la moto qui se conduit seule grâce à un GPS, le projet a déjà résolu le casse-tête principal posé par un deux-roues : maintenir son équilibre. «Dès que la moto s’arrête, elle tombe, explique Eric Unnervik. Elle doit donc constamment avoir de la vitesse, et le seul moyen pour la stabiliser est d’utiliser l’angle du guidon, contrôlé par un servomoteur.»
Un ordinateur à bord
Pour cela, la petite moto est équipée d’un véritable ordinateur (une Raspberry Pi de la taille d’une carte de crédit), ainsi que de capteurs permettant de mesurer l’angle ainsi que la vitesse de l’engin. Une puce WiFi permet de démarrer l’ordinateur depuis un smartphone, et le pilote n’a alors plus qu’à choisir la direction à l’aide d’une télécommande. C’est l’ordinateur qui procède lui-même à tous les ajustements nécessaires pour que la moto reste sur ses roues.
Si la moto développée par Eric Unnervik a encore besoin d’un coup de pouce de son pilote, la Laboratoire d’automatique planche déjà sur des versions qui seront capables de suivre un tracé prédéterminé. L’objectif ultime étant de voir la machine faire mieux que le conducteur humain. «Le but serait que, dans une course entre une moto autonome et une machine pilotée en mode manuel, notre moto puisse battre ce pilote», souligne l’étudiant.
Images à télécharger