Des robots de gomme qui imitent les muscles

Les robots "soft" des chercheurs EPFL pourraient servir d'outils de réhabilitation ©Marc Delachaux 2016 EPFL
Une équipe de l’EPFL a développé des robots flexibles, mous, et reconfigurables, qui peuvent servir d’outils de réhabilitation. Mis en mouvement par injection d’air, ces robots imitent les muscles, et peuvent être produits à large échelle.
Traditionnellement, on attend d’un robot qu’il soit rigide, rapide et performant. Il en va tout autrement des robots développés au sein du Laboratoire de robotique reconfigurable (RRL) de l’EPFL : les soft robots.
Composés d’élastomères, tels que la silicone et la gomme, ces robots mous ont été créés pour côtoyer l’humain de très près et l’accompagner dans ses mouvements, tout en préservant sa sécurité. Leurs moteurs sont inspirés des muscles et leur corps est composé de plusieurs «ballons». Les mouvements des robots sont contrôlés en faisant varier la pression de l’air dans les différents ballons. Récemment, les chercheurs du RRL ont développé un modèle qui permet de prédire et contrôler précisément le comportement mécanique de différents modules. Il vient d’être publié dans Nature - Scientific reports.
Les applications générales pour les soft robots vont de la réhabilitation des patients à la manipulation d’objet fragiles, en passant par la fabrication de systèmes biomimétiques, ou l’assistance à domicile. «Nos robots sont principalement conçus autour de la sécurité de l’utilisateur, explique Jamie Paik, directrice du RRL. Les risques de se blesser sont moindres si l’on porte un exosquelette composé de matériaux mous, par exemple», illustre-t-elle.
Un modèle pour contrôler les actuateurs
Dans leur publication, les chercheurs ont montré qu’ils pouvaient prédire précisément les mouvements d’une gamme de modules, dont la structure est faite de compartiments et de chambres placées en sandwich. Ces actuateurs en forme de concombre peuvent s’étirer sur près de 5 à 6 fois leur longueur et se plier de manière bidirectionnelle, selon les modèles.
«Nous avons procédé à de nombreuses simulations et établi un outil pour prédire la déformation des actuateurs, en fonction de leur forme, de leur épaisseur ou des matériaux dont ils sont composés», explique Gunjan Agarwal, première auteur de la publication. L’une des variantes consiste par exemple à «habiller» l’actuateur d’une carapace en papier épais, plié grâce à la technique des origamis.
«Les constructions en élastomères sont très résistantes mais difficiles à contrôler. Il est nécessaire de pouvoir prédire comment ils se déforment, et dans quelle direction. Notre outil pour fabriquer les robots est maintenant disponible online, et téléchargeable par tout roboticien ou étudiant qui le souhaite.»
Une ceinture d’aide à la réhabilitation
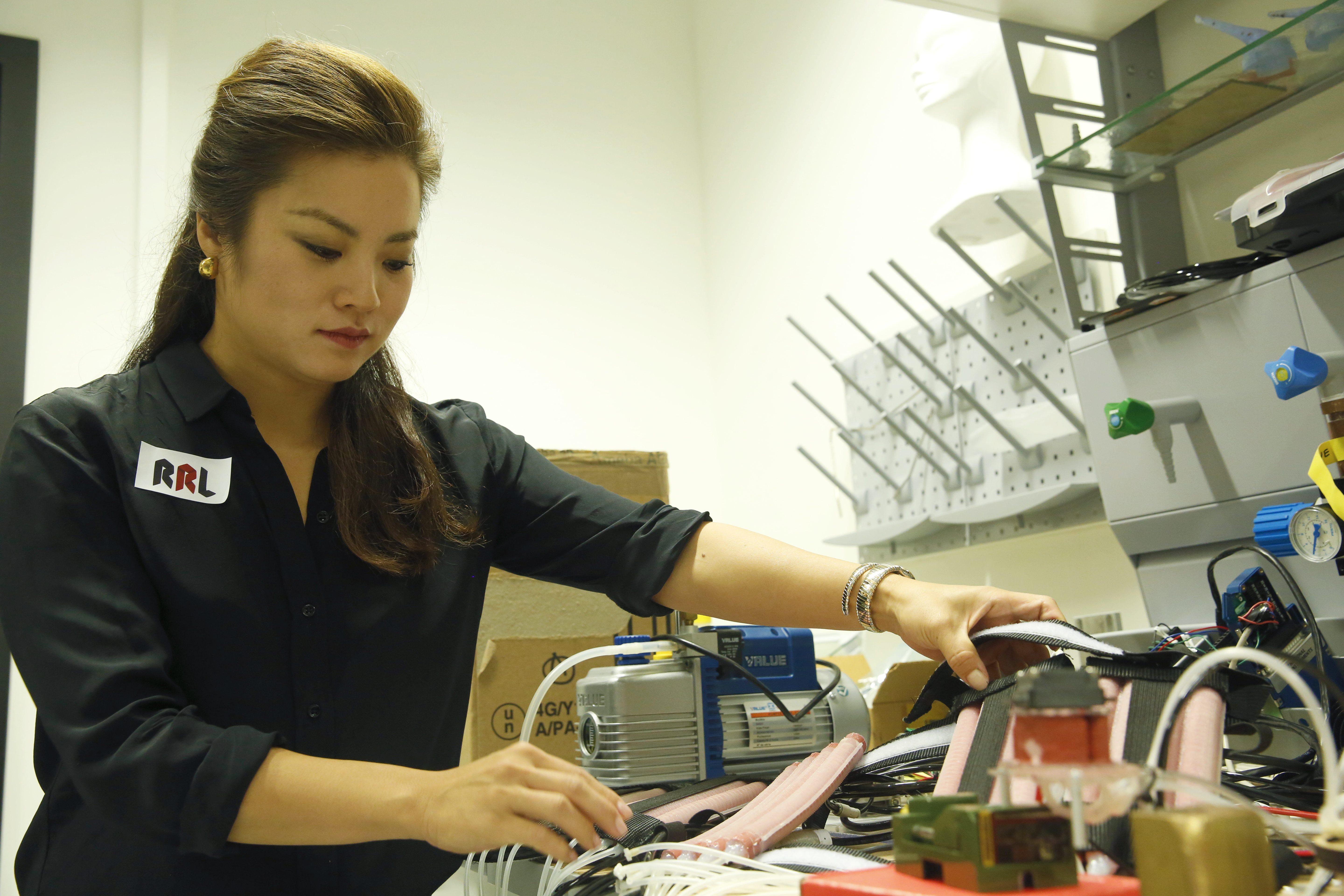
Outre ce travail de simulation, d’autres chercheurs du RRL ont développé des spécimens destinés au domaine médical, qui ont quant à eux été décrits dans le journal Soft robotics. C’est le cas d’une ceinture faite de plusieurs éléments gonflables, qui vise à soutenir et guider les mouvements de patients lors d’exercices de réhabilitation.
«Nous travaillons avec des physiothérapeutes du CHUV, qui s’occupent de personnes ayant subi une attaque cérébrale, explique Matthew Robertson, scientifique en charge du projet. L’idée est d’utiliser la ceinture pour soutenir le tronc du patient, et lui redonner une sensibilité dans les mouvements.»
Les modules de la ceinture sont faits de tubes de gomme rose et de fil de pêche transparent. La disposition du fil permet de guider la déformation, lorsque l’air est insufflé. «Pour l’instant, la ceinture est rattachée à un mécanisme de pompes externe. La prochaine étape consiste à miniaturiser et intégrer ce système directement sur la ceinture.»
Des robots adaptables et reconfigurables
Et les possibilités offertes par les robots soft ne s’arrêtent pas là. Les chercheurs utilisent aussi les actionneurs par insufflation d’air pour développer des robots capables de se déplacer dans un environnement étriqué et hostile. De par leur structure entièrement molle, ces derniers devraient aussi être capable de résister à des compressions, et des écrasements.
«Grâce aux actuateurs «soft», nous pouvons inventer des robots aux formes multiples. Les matériaux qui les composent sont peu chers et une construction à large échelle est facilement envisageable, commente Jamie Paik. Cela ouvre de nouvelle portes pour la robotique», conclut-elle.
Liens
Images à télécharger