Des essaims de drones évitent les obstacles sans collision
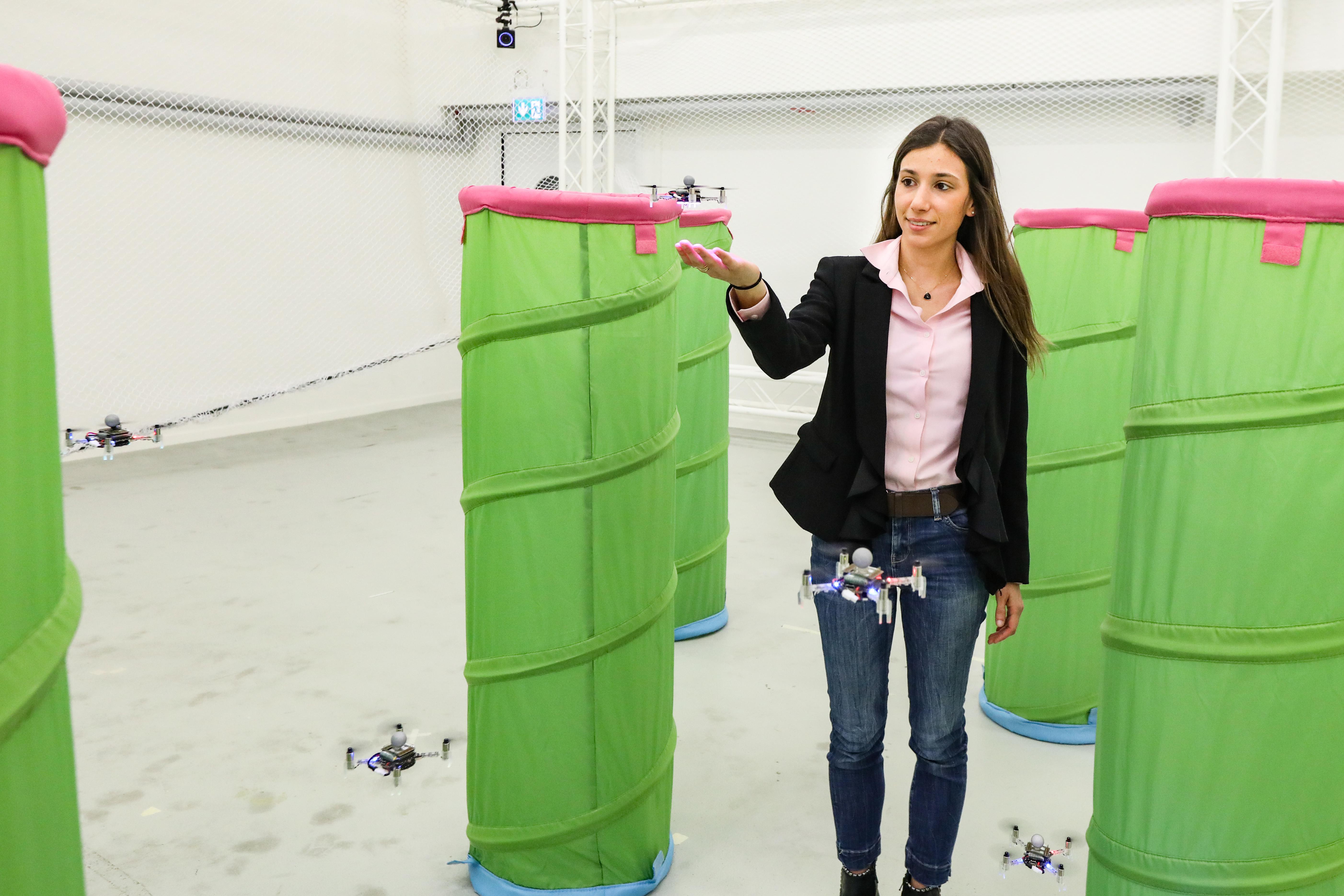
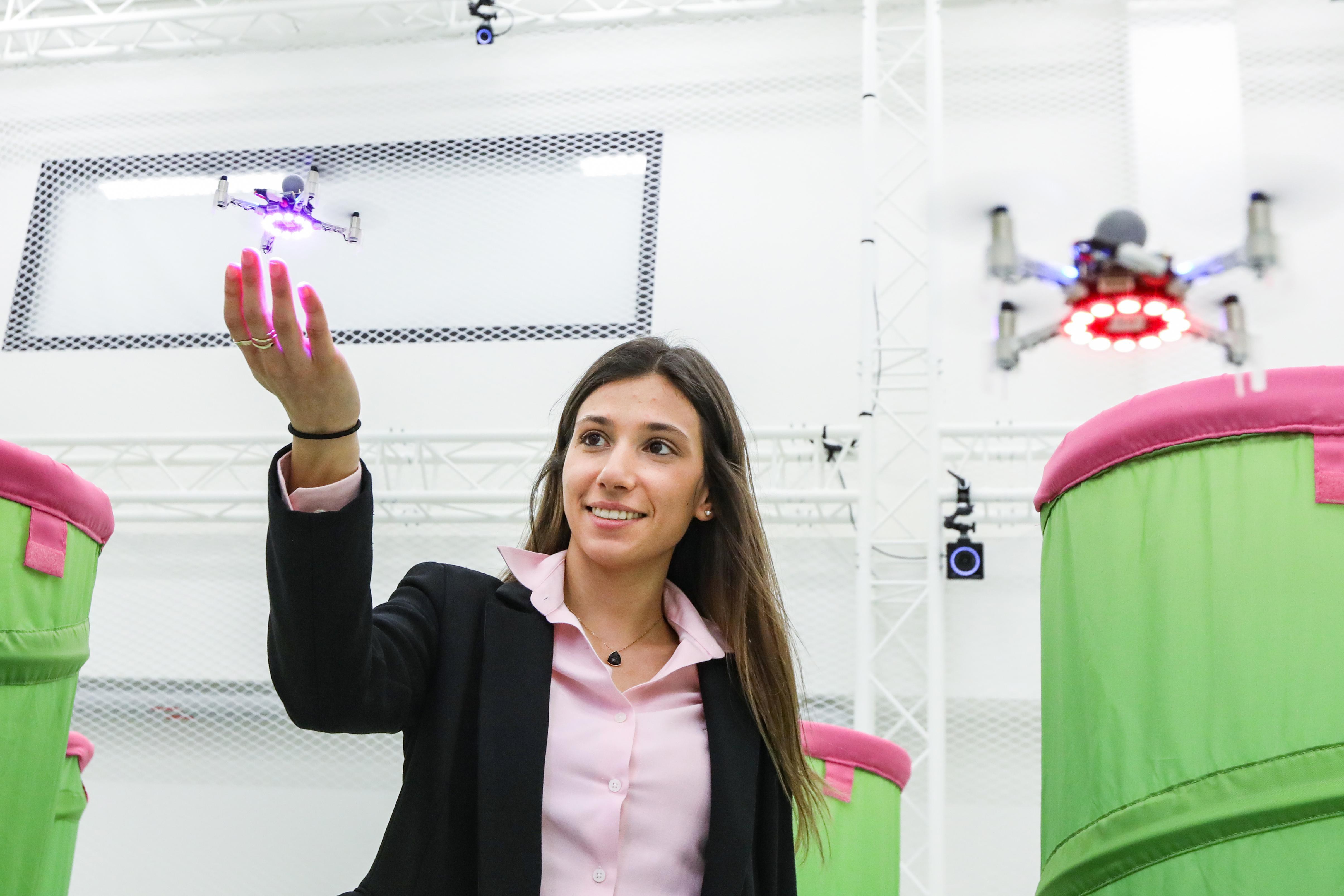
Des scientifiques de l’EPFL ont fait voler des essaims de drones dans des environnements encombrés, de manière sûre et rapide. Les robots peuvent prédire leurs comportements et ceux de leurs voisins.
L’union fait la force : un proverbe qui ne s’applique pas seulement aux humains, mais aussi aux drones. En volant en essaim, ils sont capables de survoler des territoires beaucoup plus étendus que ne le ferait un seul drone, et de récolter une plus grande variété d’informations, puisque chaque individu peut être doté de capteurs différents.
Comment éviter les collisions?
Un obstacle majeur reste à surmonter avant que cette approche ne puisse être pleinement exploitée: les bouchons. Des études sur les déplacements collectifs chez les animaux montrent en effet qu’en groupe, les individus se coordonnent grâce à des comportements réactifs, pour assurer par exemple le maintien d'une distance de sécurité ou l'alignement de la direction du mouvement.
«Cela signifie que dans un essaim, lorsque les drones modifient leur trajectoire pour éviter un obstacle, les agents se contentent de synchroniser leurs mouvements en réagissant aux actions de leurs voisins, explique Dario Floreano, Professeur à la Faculté des Sciences et Techniques de l’Ingénieur, et à la tête du Laboratoire des Systèmes Intelligents (LIS). Mais ces réactions entraînent des ralentissements, des bouchons, et finalement des collisions.»
Réagir, mais aussi anticiper
Enrica Soria, doctorante au LIS, a développé une méthode novatrice pour contourner cette limite. Une approche prédictive permet aux drones de ne pas simplement réagir aux mouvements des autres drones, mais d’anticiper aussi leurs comportements et ceux des autres. «Les robots acquièrent la capacité d’anticiper un ralentissement futur et de réduire leur impact sur le vol en temps réel», explique la chercheuse.
Pour y parvenir, les drones se basent sur des règles locales et simples, par exemple la nécessité de garder une certaine distance avec ses voisins, de maintenir une vitesse donnée, ou encore de privilégier une certaine direction de vol. Ces résultats sont publiés dans Nature Machine Intelligence.
Ce modèle rend également les drones beaucoup moins dépendants de l’ordinateur central. Dans les spectacles de lumière aériens, les drones se reposent sur les instructions d’un ordinateur, qui calcule la trajectoire de chaque individu afin d’éviter les collisions. «Avec notre modèle, ce sont les informations locales qui permettent aux drones d’adapter leur trajectoire, pas l’ordinateur», rappelle Enrica Soria.
Un modèle inspiré de la nature
Les travaux du Laboratoire des Systèmes Intelligents montrent que ce système améliore la rapidité, la sécurité et la cohésion des drones volant dans des environnements encombrés. «Nous ne savons pas encore si, et jusqu’à quel point, les animaux prédisent les mouvements de leurs voisins, ajoute Dario Floreano. Mais des biologistes ont récemment suggéré que les changements de direction synchronisés observés dans de grands groupes d’animaux exigeraient des capacités cognitives plus sophistiquées que ce qui était suggéré jusqu’ici.»
Images à télécharger