Des doigts robotiques pour saisir en douceur

© 2016 EPFL
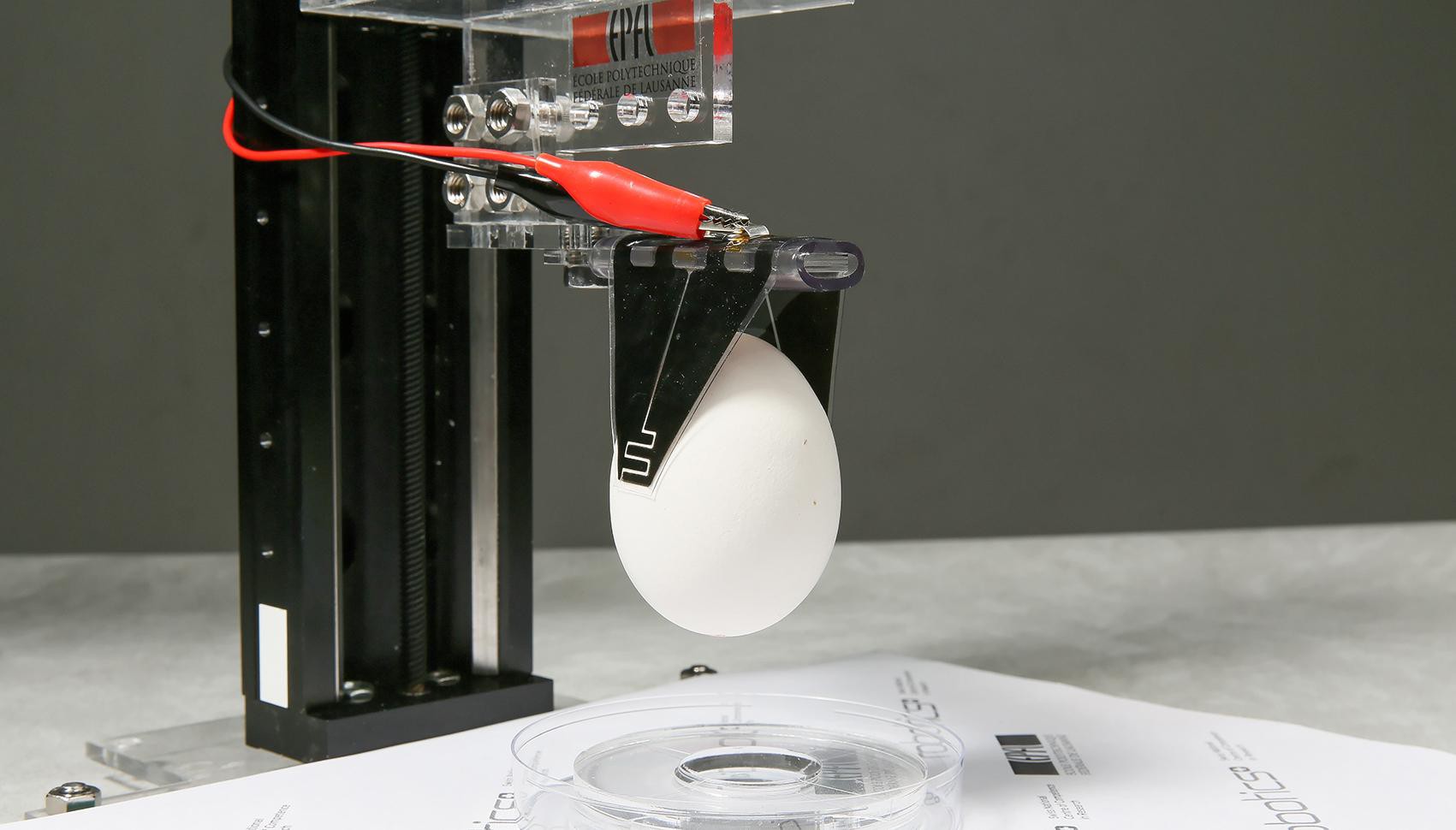
L'électronique souple est en train de changer la manière dont les robots peuvent toucher. Des scientifiques de l'EPFL ont développé une pince robotique – constituée de caoutchouc et d'électrodes extensibles – qui peut se pencher pour saisir des objets aussi délicats que des œufs et du papier, propulsant ainsi la robotique à un niveau inédit.
Avez-vous déjà frotté un ballon sur vos cheveux pour qu'il se colle au mur ? Cette adhérence électrostatique, appelée électro-adhérence, pourrait bien changer la robotique pour toujours.
Des scientifiques de l'EPFL ont inventé une nouvelle pince douce: des lames-électrodes flexibles qui agissent comme une paire pouce-index. Elle peut saisir des objets fragiles de forme et de rigidité arbitraires tels qu'un œuf, un ballon ou du papier.
Cette pince légère pourrait bientôt manipuler des aliments pour l'industrie alimentaire, ou capturer des débris dans l'espace, ou encore être incorporée dans des mains prosthétiques. La recherche, financée par NCCR Robotics, est présentée dans Advanced Materials.
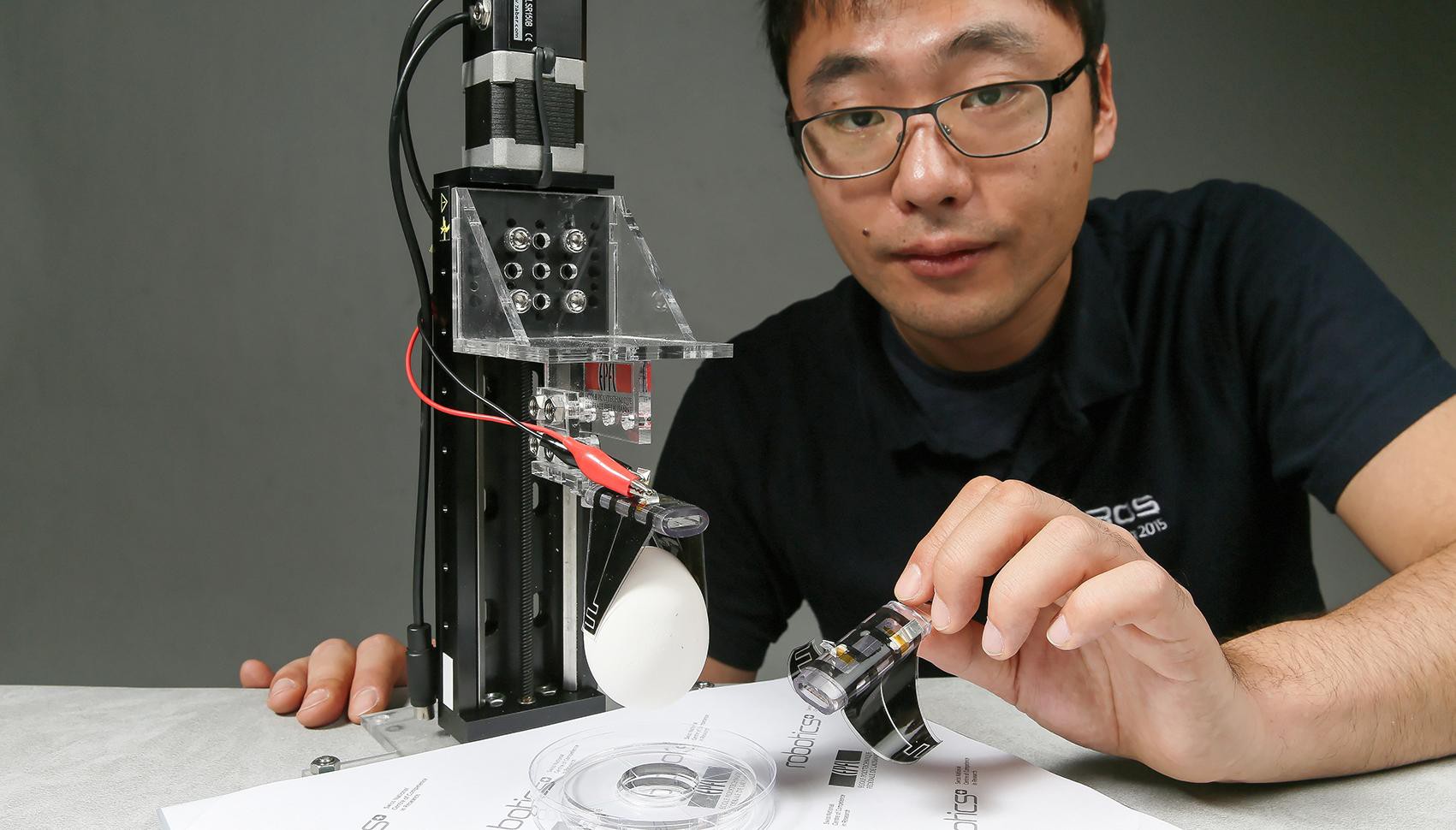
«C'est la première fois que l'électro-adhérence et la robotique douce sont associées pour saisir des objets», dit Jun Shintake, doctorant à l'EPFL et auteur principal de la publication.
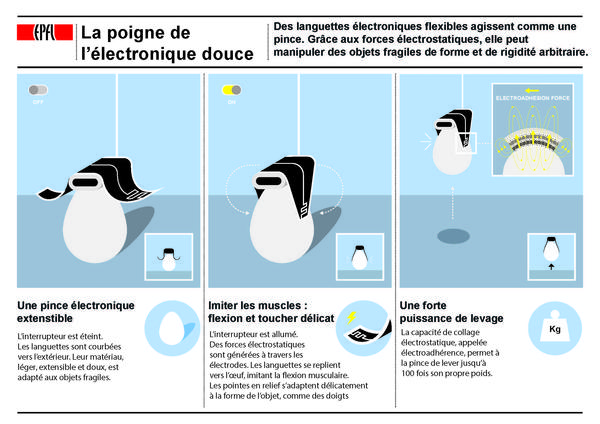
Lorsque le courant est enclenché, les électrodes se penchent vers l'objet à saisir, imitant une fonction musculaire. La pointe des électrodes se comporte comme des doigts qui s'adaptent délicatement à la forme de l'objet, et s'y agrippent par les forces électrostatiques, de la même manière que le ballon se colle au mur. Ces électrodes peuvent porter 80 fois leur propre poids, et aucune connaissance préalable de la forme de l'objet n'est nécessaire.
En comparaison, d'autres pinces douces sont contrôlées de manière pneumatique, ou alors elles échouent à saisir des objets fragiles si l'on ne leur a pas décrit préalablement la forme de l'objet. Elles se sont de même avérées incapables de manipuler des objets plats ou déformables.
«La nouveauté de notre pince douce, c'est la combinaison idéale de deux technologies: les muscles artificiels et l'électro-adhérence», dit Dario Floreano de l'EPFL, co-directeur de thèse. «Notre configuration unique d'électrodes et de membranes de silicone est ce qui nous permet de contrôler la flexion des pinces et l'adhérence électrostatique», ajoute Herbert Shea de l'EPFL, co-directeur de thèse.
Comment reproduire la fonction musculaire et adhérer aux objets
Les lames-électrodes sont formées de cinq couches: une couche d'élastomère pré-étirée située entre deux couches d'électrodes, recouvertes de deux couches externes de silicone d'épaisseurs différentes. Lorsque le courant est interrompu, la différence d'épaisseur des couches externes fait que les lames s'enroulent vers l'extérieur. Lorsque le courant est enclenché, l'attraction entre les deux couches d'électrodes raidit les membranes. Ce raidissement des membranes à partir d'une position enroulée reproduit la flexion musculaire.
A la pointe des lames, les électrodes de chaque couche sont conçues pour un adhérence électrostatique optimale. Ces électrodes interdigitées, qui évoquent deux peignes ajustés ensemble, créent un champ électrostatique qui produit l'électro-adhérence.
Images à télécharger