De nouveaux microrobots télécommandés pour des applications médicales

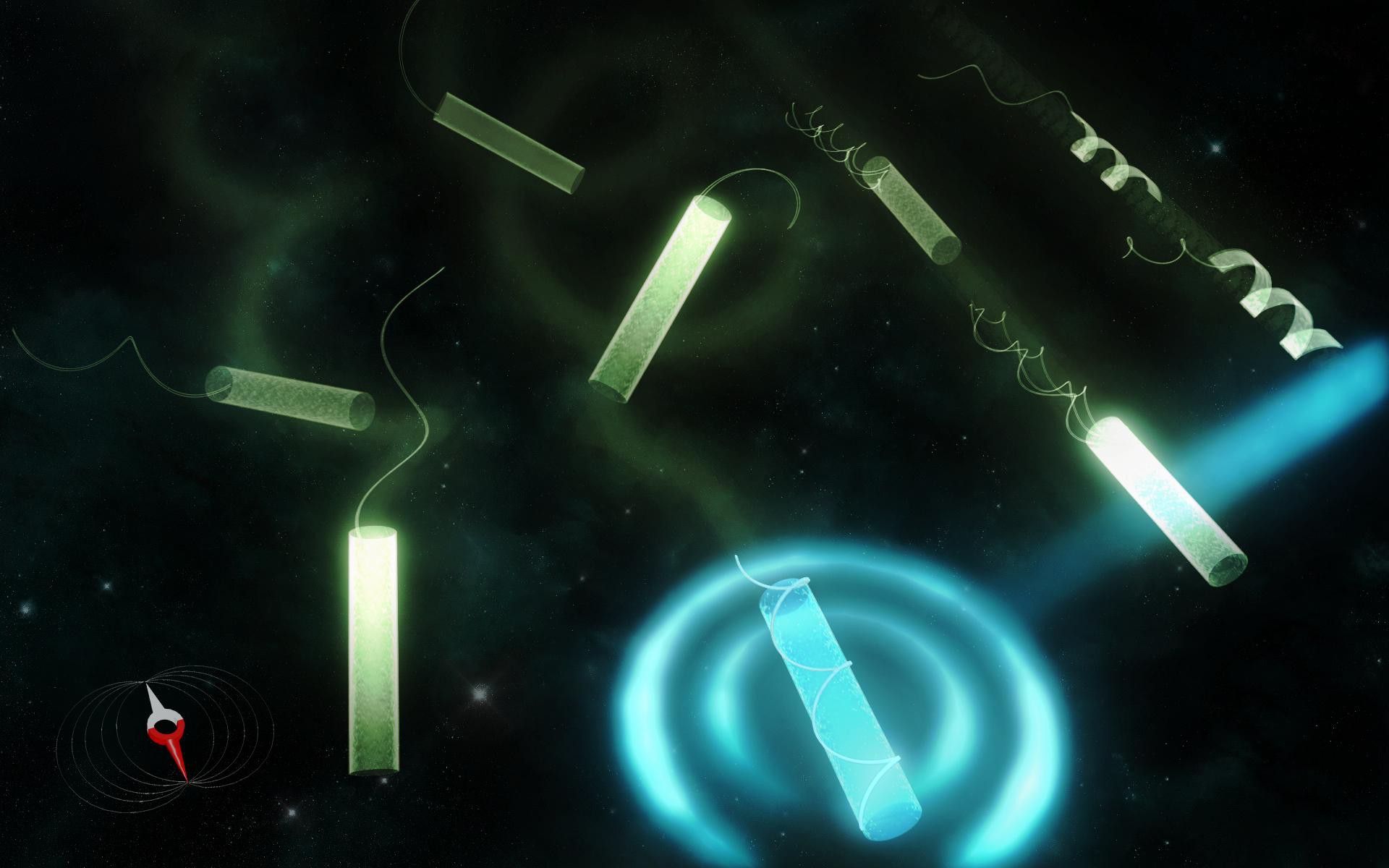
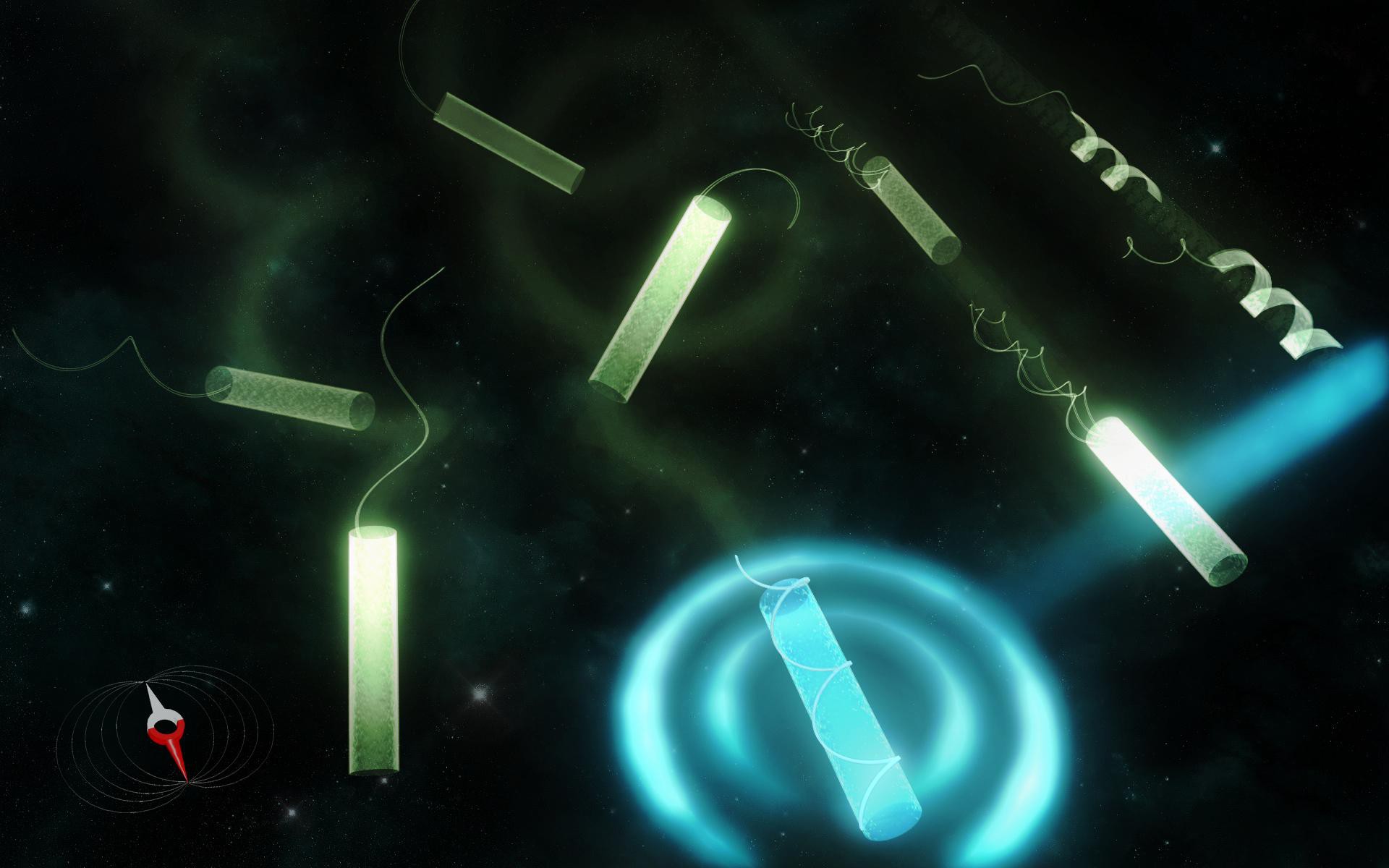
© des microrobots pour des applications médicales © EPFL/ EPFZ
Des chercheurs de l'EPFL et de l'EPFZ ont mis au point une nouvelle méthode pour fabriquer des microrobots qui pourraient être utilisés dans le corps humain pour délivrer des médicaments et réaliser d'autres tâches médicales.
Piloter des robots miniatures dans le corps humain, afin qu'ils larguent des médicaments à des endroits spécifiques, ou qu'ils débouchent des artères. Ce scénario est, depuis quelques années, au centre d'importantes recherches scientifiques dans le monde. Ces microstructures ont le potentiel d'optimiser certaines opérations médicales. Elles pourraient remplacer certains actes chirurgicaux lourds et invasifs.
C'est dans ce contexte que le scientifique Selman Sakar de l'EPFL et Bradley Nelson de l'EPFZ ont inventé une nouvelle méthode pour fabriquer des microrobots bioinspirés, dotés de particularités complexes. Ils ont également développé une plateforme pour tester différentes formes de robots, et étudier leur façon de se mouvoir. Leur travail, publié dans Nature Communications, a permis la création de microstructures reconfigurables et complexes, que l'on peut fabriquer en nombre. Ils proposent en outre une plateforme pour contrôler la mobilité des robots à l'aide de champs magnétiques, et les faire changer de forme l'effet de la chaleur.
Un robot inspiré des bactéries
Au contraire des robots traditionnels, les microrobots bio-inspirés sont flexibles, et ne disposent pas de moteur. Ils sont composés d'un hydrogel biocompatible, et de nanoparticules magnétiques. Ces nanoparticules ont deux fonctions : elles donnent sa forme au robot lors de sa construction, et lui permettent ensuite de bouger et nager lorsqu'on leur applique un champ magnétique.
La fabrication d'un microrobot de ce type comporte plusieurs étapes. Les nanoparticules sont d'abord placées dans les couches d'un hydrogel biocompatible. A l'aide d'un champ magnétique, elles sont orientées de façons différentes à des endroits spécifiques. S'en suit une polymérisation, afin de « solidifier » l'hydrogel. Le robot est ensuite placé dans l'eau, où il se plie de manière spécifique, selon la répartition des nanoparticules dans le gel. C'est ce qui donne l'architecture 3D finale du microrobot.
Une fois que le robot dispose de sa morphologie finale, un courant électromagnétique est utilisé pour le faire nager. Il peut aussi se « déplier » sous l'effet de la chaleur, et ainsi changer de forme. Avec cette approche, les chercheurs ont pu fabriquer des robots imitant la morphologie de la bactérie responsable de la trypanosomiase africaine ou maladie du sommeil. Dotée d'un corps et d'un flagelle, cette bactérie utilise son flagelle pour se propulser, mais lorsqu'elle entre dans le flux sanguin, elle cache son flagelle, pour des raisons de survie.
Les chercheurs ont pu imiter ce comportement, en testant différentes formes de robots. Leur prototype est doté d'un flagelle qui lui permet de naviguer. Sous l'effet de la chaleur, le flagelle s'enroule autour du corps du robot, et est ainsi «caché».
Une meilleure compréhension du comportement des bactéries
«Nous avons démontré que le corps aussi bien que le flagelle jouent un rôle important dans le déplacement de ces organismes», explique Selman Sakar. Notre nouvelle méthode de fabrication permet de tester toutes les combinaisons et formes possibles pour obtenir la meilleures mobilité pour une tâche donnée», explique-t-il. «Cette étude permet aussi de mieux comprendre le déplacement de certaines bactéries dans le corps humain, et la façon dont elles s'adaptent aux changements dans leur microenvironnement. »
Pour l'heure, tous les microrobotssont encore au stade du développement. « Il y a encore de nombreux paramètres à prendre en compte . Il faut notamment s'assurer que leur présence n'entraînerait aucun effet secondaire néfastes chez l'humain », commente le scientifique.
-----
Les autres scientifiques impliqués dans ce travail sontAndrew Petruska and Salvador Pane
Publication dans Nature Communications : Soft micromachines with programmable motility and morphology
Liens
Images à télécharger