Comment enseigner la même compétence à différents robots

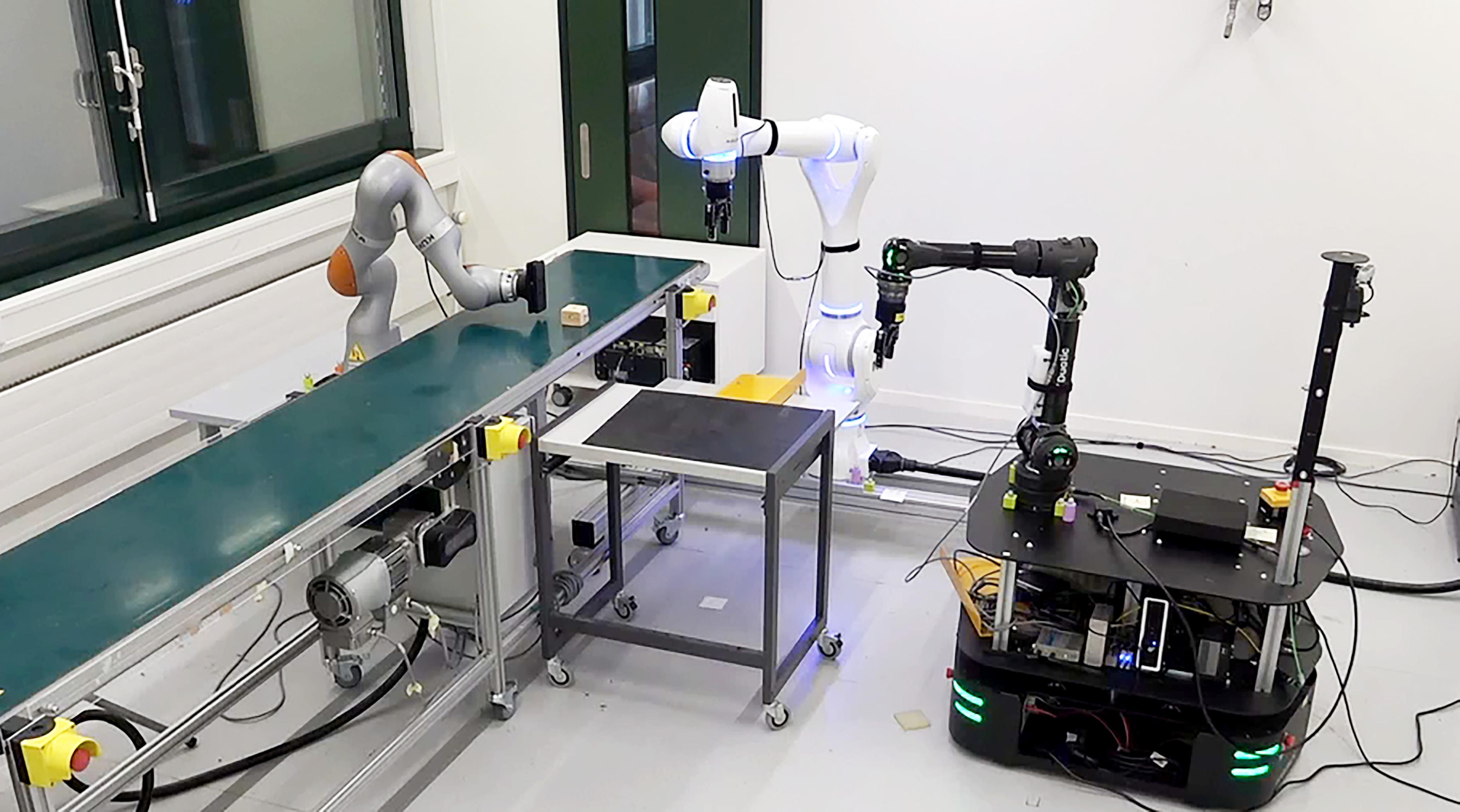
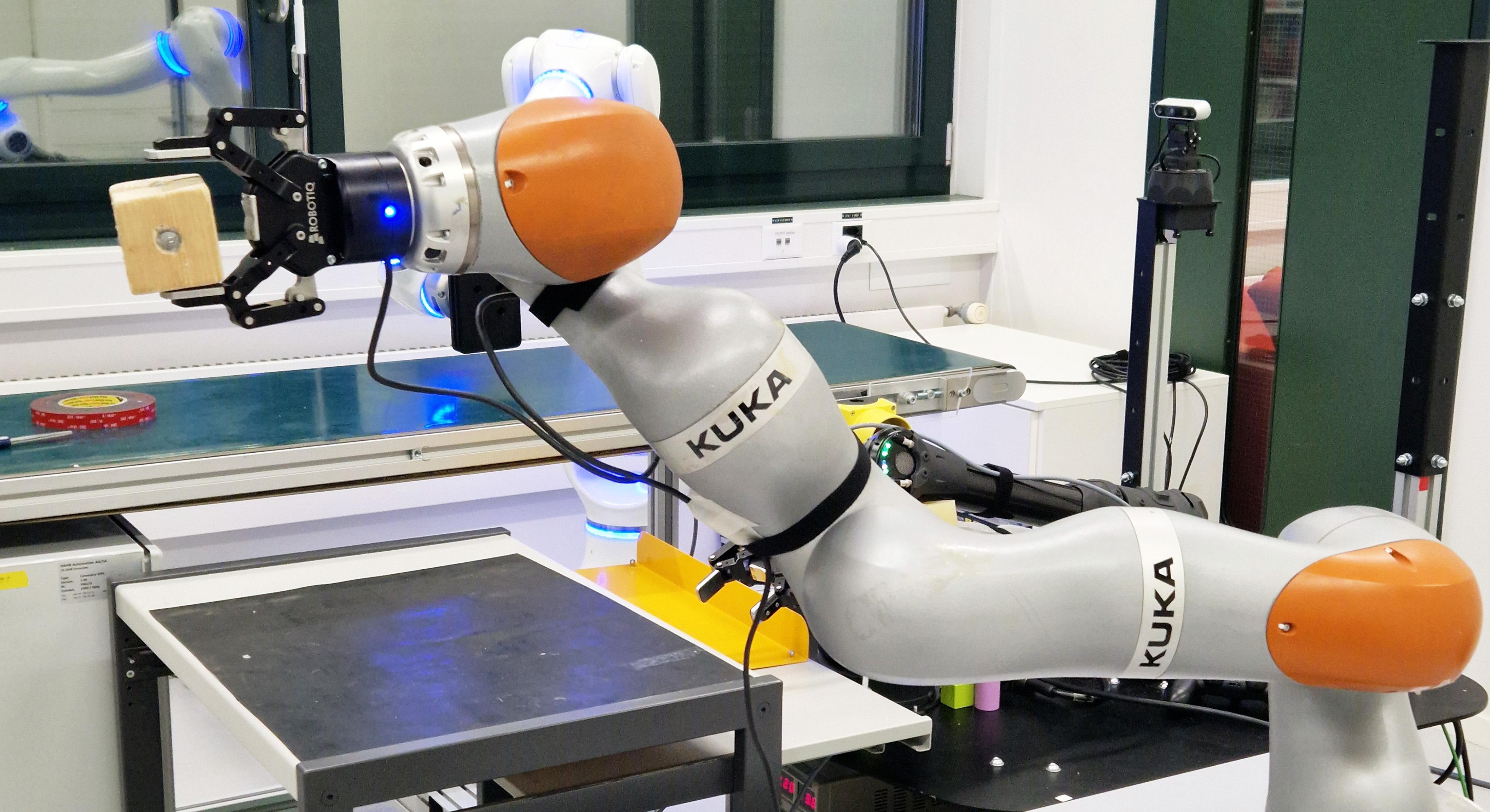
L'expérience de chaîne de montage. 2026 LASA EPFL CC BY SA
Un nouveau cadre développé par une équipe de l'EPFL permet d'enseigner une même compétence à des robots dotés de conceptions mécaniques différentes. Ils peuvent ainsi exécuter une tâche identique en toute sécurité sans qu’il soit nécessaire de réécrire le code pour chacun d'eux.
Dans les environnements de production actuels, moderniser un parc de robots demandesouvent de repartir de zéro. Il faut non seulement remplacer le matériel, mais aussi reprogrammer les tâches. Même lorsque deux robots sont conçus pour effectuer des tâches similaires, des différences dans l’agencement des articulations ou des limites de mouvement font qu’une tâche programmée pour l’un ne peut souvent pas être utilisée sur l’autre. Transférer directement les compétences entre robots pourrait rendre ces systèmes plus durables et plus rentables.
Pour relever ce défi, des chercheuses et chercheurs du Laboratoire des algorithmes et systèmes d’apprentissage (LASA) de la Faculté des sciences et techniques de l’ingénieur de l’EPFL ont développé un nouveau cadre de contrôle robotique appelé Kinematic Intelligence. Cette méthode prend une tâche montrée par un humain et la convertit mathématiquement en une stratégie de mouvement générale, puis l’adapte afin que différents robots puissent l’exécuter en fonction de leur conception physique. Ces travaux ont été publiés dans Science Robotics.
« Ils répondent à un défi de longue date en robotique : comment transférer une compétence acquise à des robots dotés de structures mécaniques différentes, tout en garantissant un comportement sûr et prévisible », explique Aude Billard, professeure au LASA. « Cette approche pourrait réduire considérablement le temps et l’expertise nécessaires au déploiement de robots dans des environnements réels. »
Pour un apprentissage transférable entre robots
Pour construire leur cadre, les scientifiques ont d’abord sélectionné des tâches de manipulation d’objets montrées par des humains – telles que poser, pousser ou lancer – et les ont enregistrées à l’aide d’une technologie de capture de mouvement. Ils ont ensuite converti mathématiquement ces tâches enregistrées en stratégies de mouvement générales. Ils ont aussidéveloppé une classification systématique des limites physiques de différents types de robots, notamment l’amplitude de mouvement de leurs articulations et les positions qu’ils doivent éviter afin de rester stables. Le cadre utilise ensuite cette classification pour adapter automatiquement les stratégies de mouvement générales aux différentes morphologies de robots, garantissant qu’ils effectuent les tâches de manière sûre et dans les limites de leurs capacités mécaniques.
Chaque robot interprète la même compétence à sa manière, mais toujours dans des limites sûres et réalisables.
Lors d’une expérience sur une chaîne de montage, un humain a montré une tâche consistant àpousser un bloc de bois d’un tapis roulant vers un établi, le placer sur une table, puis le lancerdans un panier. Grâce à Kinematic Intelligence, trois robots commerciaux totalement différents ont pu reproduire cette même séquence de manière sûre et fiable.
« Chaque robot a pris en charge différentes étapes de la tâche, et le système a fonctionné avec succès, même lorsque la répartition des étapes a été modifiée », explique Sthithpragya Gupta, doctorant au LASA et co-premier auteur. « Chaque robot interprète la même compétence à sa manière, mais toujours dans des limites sûres et réalisables. »
Vers une robotique évolutive
Les scientifiques souhaitent étendre ce cadre à des contextes tels que la collaboration homme-robot et les interactions basées sur le langage naturel. Par exemple, Kinematic Intelligence pourrait permettre à une personne de donner des instructions à un robot à l’aide de commandes simples, chez elle, sans nécessiter de compétences techniques en programmation. Cette approche est aussi pertinente pour les plateformes robotiques émergentes, où l’évolution rapide du matériel exige que les machines actuelles soient remplacées par des versions plus récentes. Permettre un transfert fluide des compétences entre ces plateformes pourrait jouer un rôle clé dans leur adoption à grande échelle.
« Notre objectif est de supprimer le besoin d’expertise technique tout en garantissant un fonctionnement sûr et fiable », résume Durgesh Haribhau Salunkhe, scientifique au LASA et co-premier auteur. « L’utilisateur ou l’utilisatrice apporte l’idée et le comportement souhaité ;le robot se charge du reste. »
Gupta S., Salunkhe D. H., Billard A. “Demonstrate once, execute on many: Kinematic intelligence for cross-robot skill transfer”. Science Robotics (2026). 10.1126/scirobotics.aea1995
Images à télécharger