Asea Brown Boveri Ltd. (ABB) Award 2018 – Miao Li

© 2018 Miao Li
Dynamic Grasp Adaptation -- From Humans To Robots
EPFL thesis n°6908 (2016)
Thesis director: Prof. A. Billard
"For his exceptional contributions to robotics, via the development of robust algorithms for dexterous manipulation of complex objects, and for the highly successful transfer of this technology to real-world industrial manipulation"
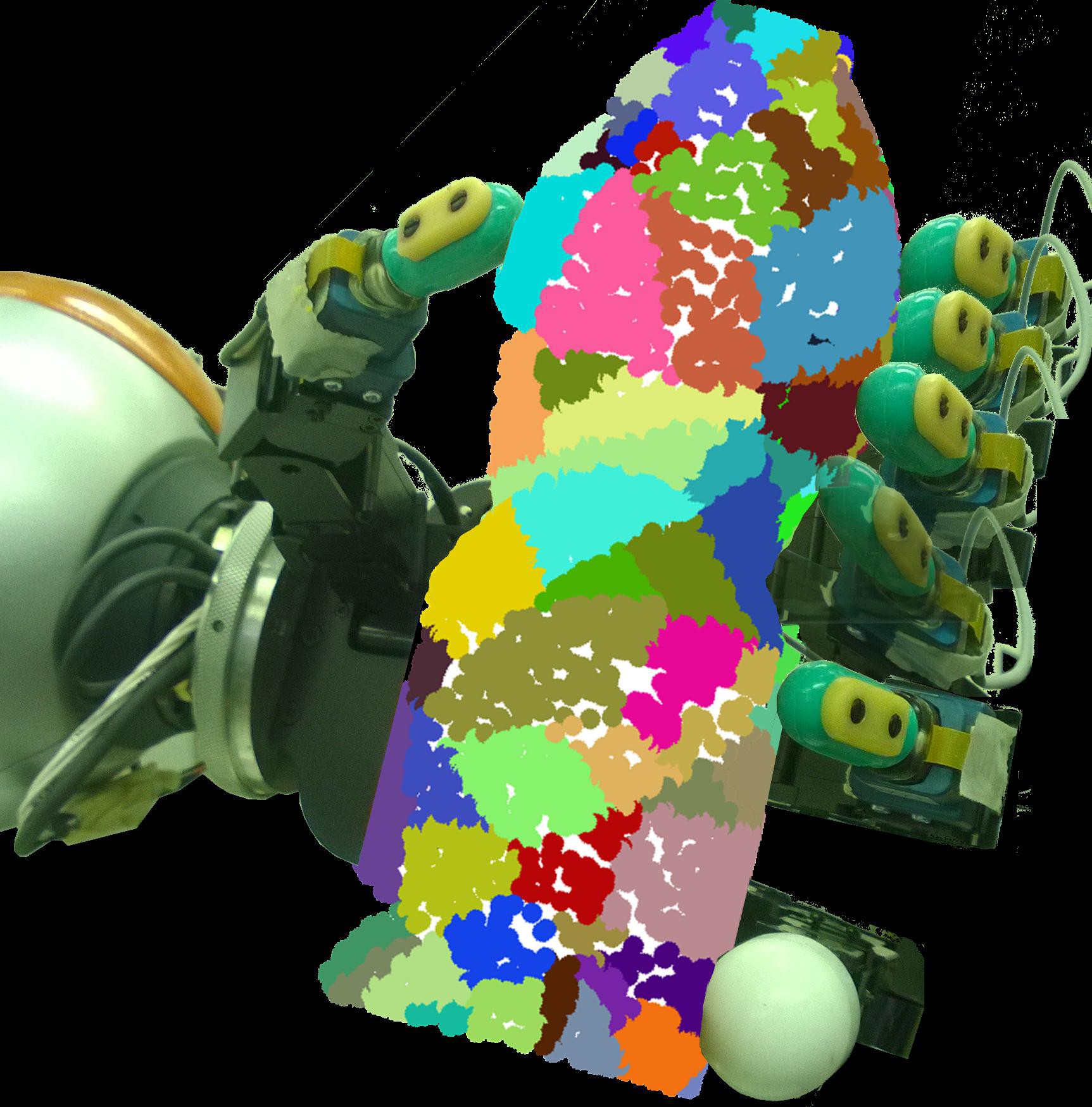
Human hand is an amazing tool, demonstrated by its incredible motor capability and remarkable sense of touch. To enable robots to work in a human-centric environment, it is desirable to endow robotic hands with human-like capabilities for grasping and object manipulation. However, due to its inherent complexity and inevitable model uncertainty, robotic grasping and manipulation remains a challenge. This thesis focuses on grasp adaptation in the face of model and sensing uncertainties: Given an object whose properties are not known with certainty (e.g., shape, weight and external perturbation), and a robotic hand, we aim at determining where to put the fingers and how the fingers should adaptively interact with the object using tactile sensing, in order to achieve either a stable grasp or a desired dynamic behaviour.
A central idea in this thesis is the object-centric dynamics: namely, that we express all control constraints into an object-centric representation. This is an essential feature that distinguishes our work from other robust grasping work in the literature, where generating a static stable grasp for a given hand is usually the primary goal. In this thesis, grasp adaptation is a dynamic process that flexibly adapts the grasp to fit some purpose from the object's perspective, in the presence of a variety of uncertainties and/or perturbations.
Images to download