A color-based sensor to emulate skin's sensitivity

ChromoSense © Titouan Veuillet/Adrian Alberola Campailla
In a step toward more autonomous soft robots and wearable technologies, EPFL researchers have created a device that uses color to simultaneously sense multiple mechanical and temperature stimuli.
Robotics researchers have already made great strides in developing sensors that can perceive changes in position, pressure, and temperature – all of which are important for technologies like wearable devices and human-robot interfaces. But a hallmark of human perception is the ability to sense multiple stimuli at once, and this is something that robotics has struggled to achieve.
Now, Jamie Paik and colleagues in the Reconfigurable Robotics Lab (RRL) in EPFL’s School of Engineering have developed a sensor that can perceive combinations of bending, stretching, compression, and temperature changes, all using a robust system that boils down to a simple concept: color.
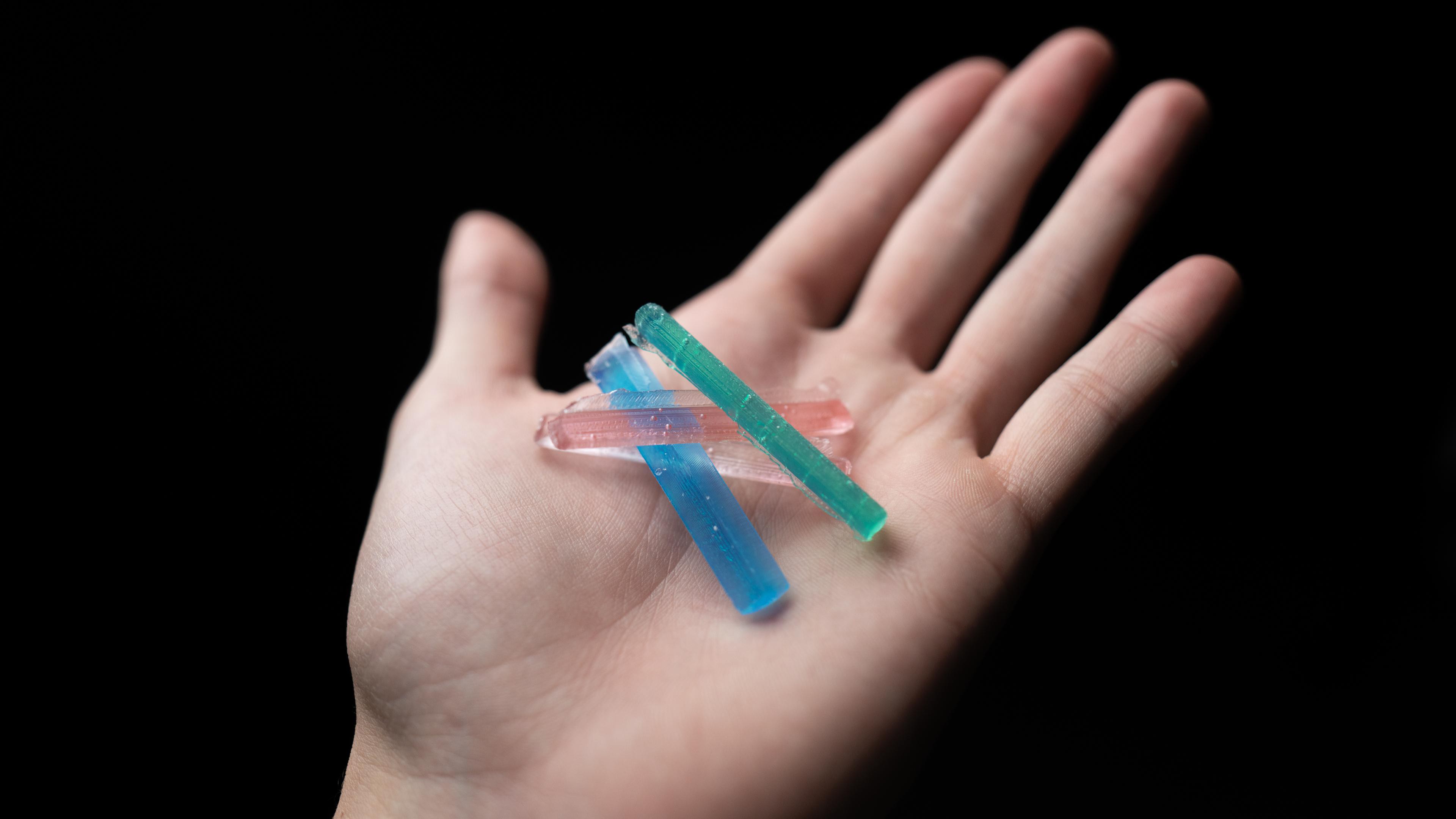
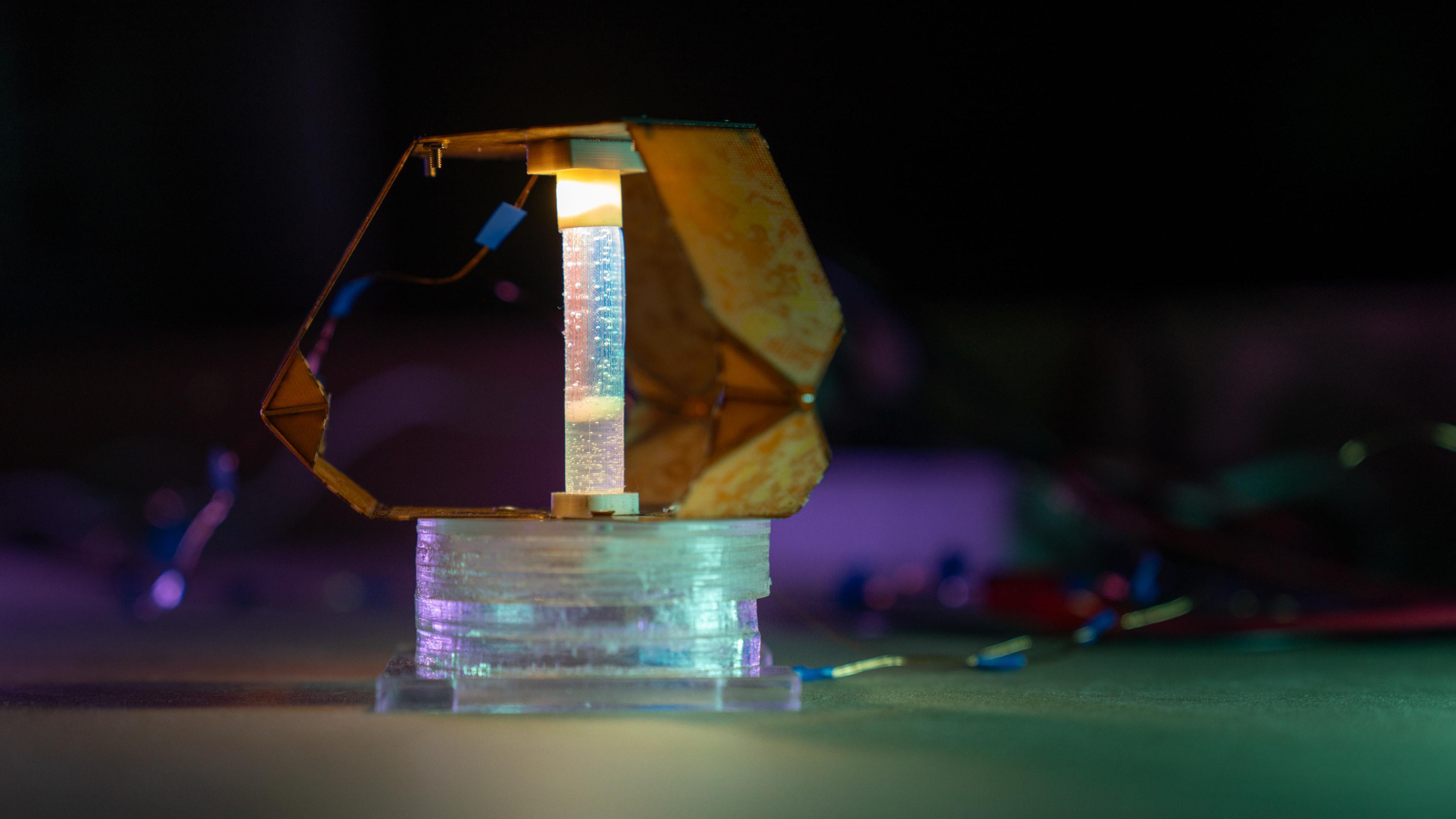
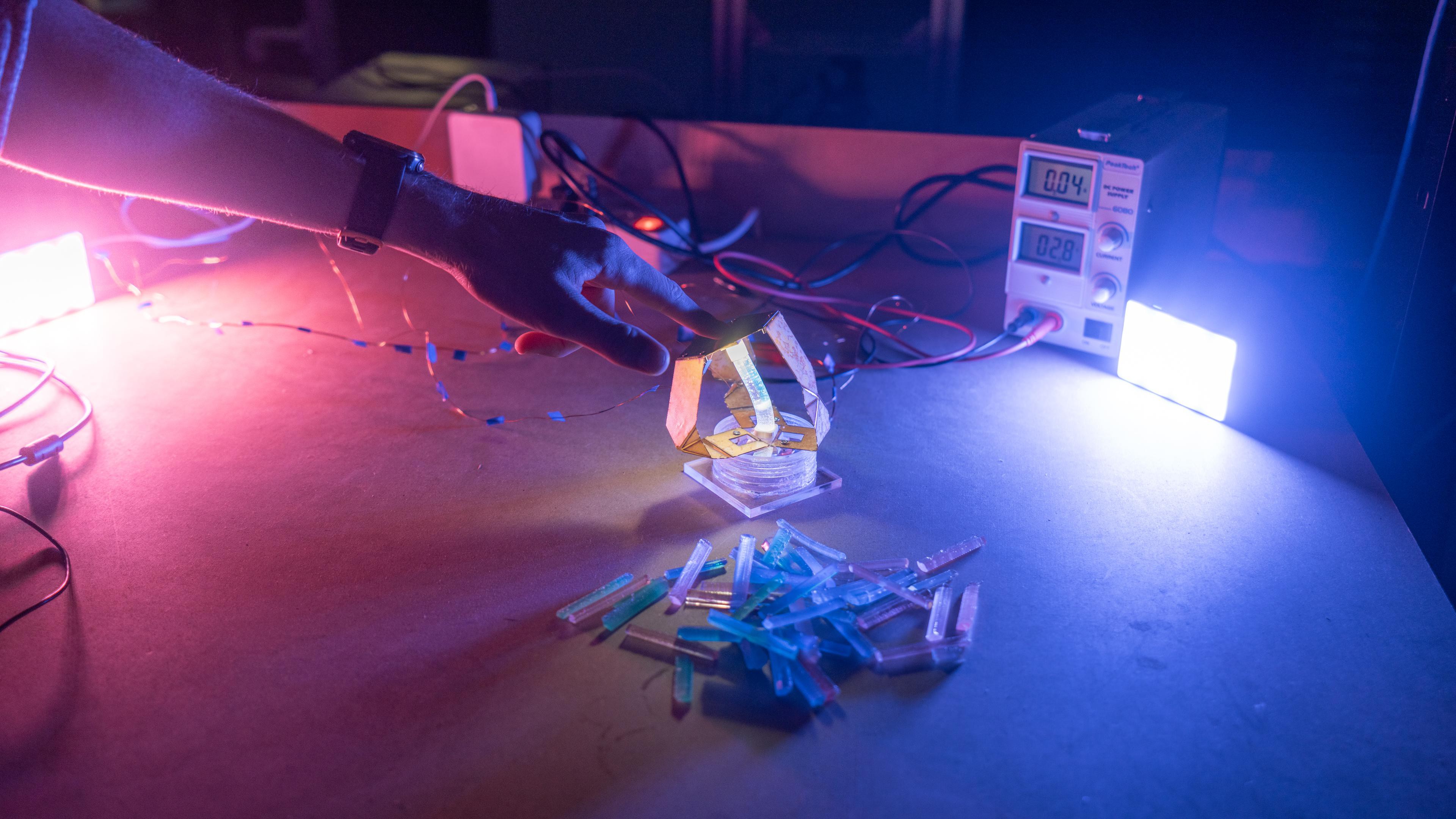
Dubbed ChromoSense, the RRL’s technology relies on a translucent rubber cylinder containing three sections dyed red, green, and blue. An LED at the top of the device sends light through its core, and changes in the light’s path through the colors as the device is bent or stretched are picked up by a miniaturized spectral meter at the bottom.
“Imagine you are drinking three different flavors of slushie through three different straws at once: the proportion of each flavor you get changes if you bend or twist the straws. This is the same principle that ChromoSense uses: it perceives changes in light traveling through the colored sections as the geometry of those sections deforms," says Paik.
A thermosensitive section of the device also allows it to detect temperature changes, using a special dye – similar to that in color-changing t-shirts or mood rings – that desaturates in color when it is heated. The research has been published in Nature Communications and selected for the Editor's Highlights page.
A more streamlined approach to wearables
Paik explains that while robotic technologies that rely on cameras or multiple sensing elements are effective, they can make wearable devices heavier and more cumbersome, in addition to requiring more data processing.
“For soft robots to serve us better in our daily lives, they need to be able to sense what we are doing,” she says. “Traditionally, the fastest and most inexpensive way to do this has been through vision-based systems, which capture all of our activities and then extract the necessary data. ChromoSense allows for more targeted, information-dense readings, and the sensor can be easily embedded into different materials for different tasks.”
Thanks to its simple mechanical structure and use of color over cameras, ChromoSense could potentially lend itself to inexpensive mass production. In addition to assistive technologies, such as mobility-aiding exosuits, Paik sees everyday applications for ChromoSense in athletic gear or clothing, which could be used to give users feedback about their form and movements.
A strength of ChromoSense – its ability to sense multiple stimuli at once – can also be a weakness, as decoupling simultaneously applied stimuli is still a challenge the researchers are working on. At the moment, Paik says they are focusing on improving the technology to sense locally applied forces, or the exact boundaries of a material when it changes shape.
“If ChromoSense gains popularity and many people want to use it as a general-purpose robotic sensing solution, then I think further increasing the information density of the sensor could become a really interesting challenge,” she says.
Looking ahead, Paik also plans to experiment with different formats for ChromoSense, which has been prototyped as a cylindrical shape and as part of a wearable soft exosuit, but could also be imagined in a flat form more suitable for the RRL’s signature origami robots.
“With our technology, anything can become a sensor as long as light can pass through it,” she summarizes.
Baines, R., Zuliani, F., Chennoufi, N. et al. Multi-modal deformation and temperature sensing for context-sensitive machines. Nat Commun 14, 7499 (2023). https://doi.org/10.1038/s41467-023-42655-y
Images to download