Une mini-pompe souple pour la nouvelle génération de soft robots

Une pompe souple d'un genre nouveau © Vito Cacucciolo / 2019 EPFL
Des chercheurs de l’EPFL ont mis au point une minuscule pompe flexible et silencieuse d’un gramme, qui ouvre de nouvelles possibilités pour créer des robots souples autonomes, des exosquelettes légers et des textiles intelligents. Exit les pompes volumineuses, bruyantes et rigides utilisées actuellement. Leur recherche est publiée dans Nature.
Au contraire des robots rigides traditionnels, les robots souples peuvent s’adapter à des environnements complexes, manipuler des objets délicats et interagir avec les humains sans risque. Faits de silicone ou d’autres polymères étirables, ils sont envisagés pour fabriquer des exosquelettes, des vêtements robotiques, ainsi que des robots explorateurs bioinspirés, capables de se déplacer dans des environnements inaccessibles ou dangereux.
Pour se mouvoir, la majorité de ces robots dépend de pompes rigides et bruyantes, qui font circuler des fluides dans leurs différents membres. Chaque robot est relié à ce dispositif lourd par des tubes, ce qui entrave son autonomie, et limite le développement de versions portables par l’humain.
Libérer les robots de leurs attaches
A l’EPFL, des chercheurs du Laboratoire de Microsystèmes Souples (LMTS) et du Laboratoire de systèmes intelligent (LIS), en collaboration avec des chercheurs du Shibaura Institute of Technology au Japon, ont conçu la première pompe entièrement souple, et ne pesant qu’un seul gramme. Dotée d’électrodes étirables, elle est totalement silencieuse et consomme très peu d’énergie. Elle est alimentée via un circuit de deux centimètres sur deux, qui comprend une petite alimentation rechargeable. «Pour actionner des robots plus volumineux, nous pouvons connecter plusieurs pompes entre elles», précise Herbert Shea, directeur du LMTS.

Trois pompes connectées entre elles © Vito Cacucciolo / 2019 EPFL
Cette technologie fait l’objet d’une publication dans Nature. Elle a le potentiel de libérer les robots souples de leurs attaches. «Nous pensons qu’elle représente un changement de paradigme pour le domaine de la robotique souple», commente Herbert Shea.
Autre atout de ces petites pompes : elles peuvent faire circuler des fluides à l’intérieur de petits tubes, intégrables directement dans des vêtements. Elles permettent ainsi la fabrication d’habits intelligents, capables de chauffer ou refroidir différentes parties du corps. De quoi intéresser les athlètes, les chirurgiens ou les pilotes.
Comment ça marche ?
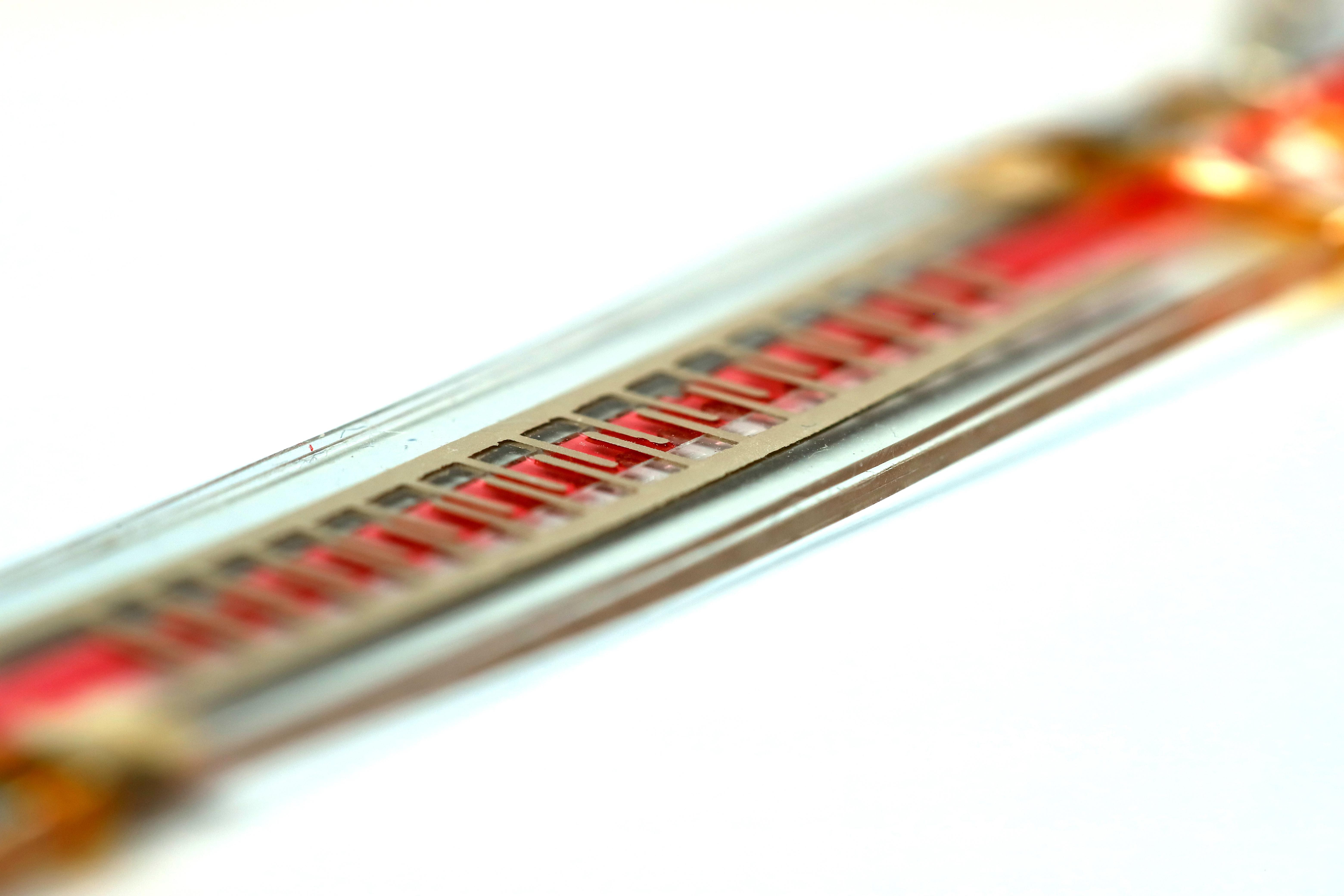
Le système est basé sur un mécanisme physique de circulation des fluides, déjà utilisé pour refroidir les superordinateurs. La pompe comprend un canal d’un millimètre de diamètre renfermant un liquide diélectrique, et des rangées d’électrodes. Lorsqu’une tension est appliquée au système, les électrons sautent depuis les électrodes vers le liquide, et chargent électriquement certaines molécules. Ces dernières sont attirées vers d’autres électrodes, et poussent le reste du fluide dans les tuyaux. «Nous pouvons accélérer le mouvement en jouant avec le champs électrique, le tout sans aucun bruit», explique Vito Cacucciolo, postdoctorant au LMTS et premier auteur de la publication.
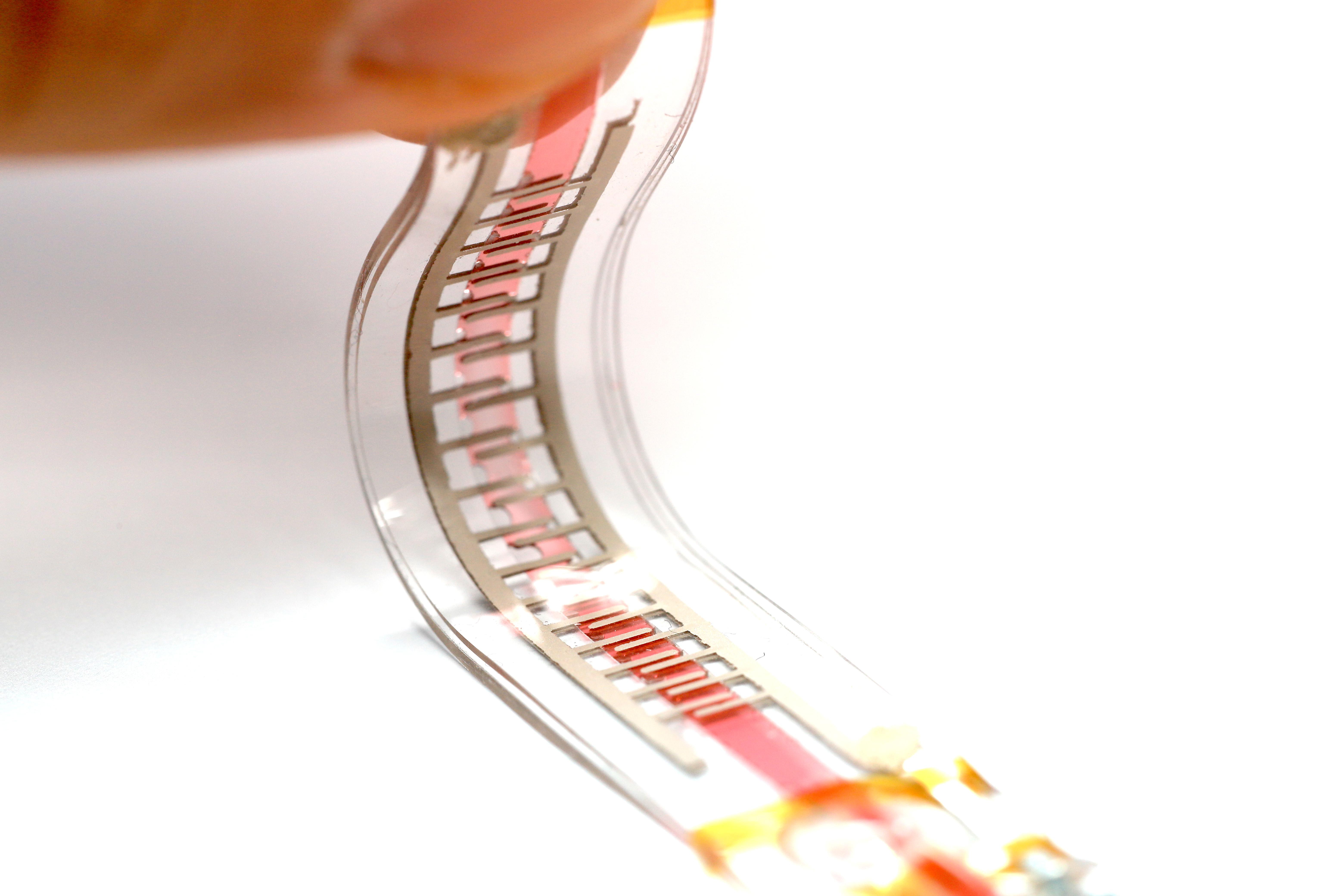
Une pompe facilement pliable © Vito Cacucciolo / 2019 EPFL
Des muscles artificiels pour le Japon
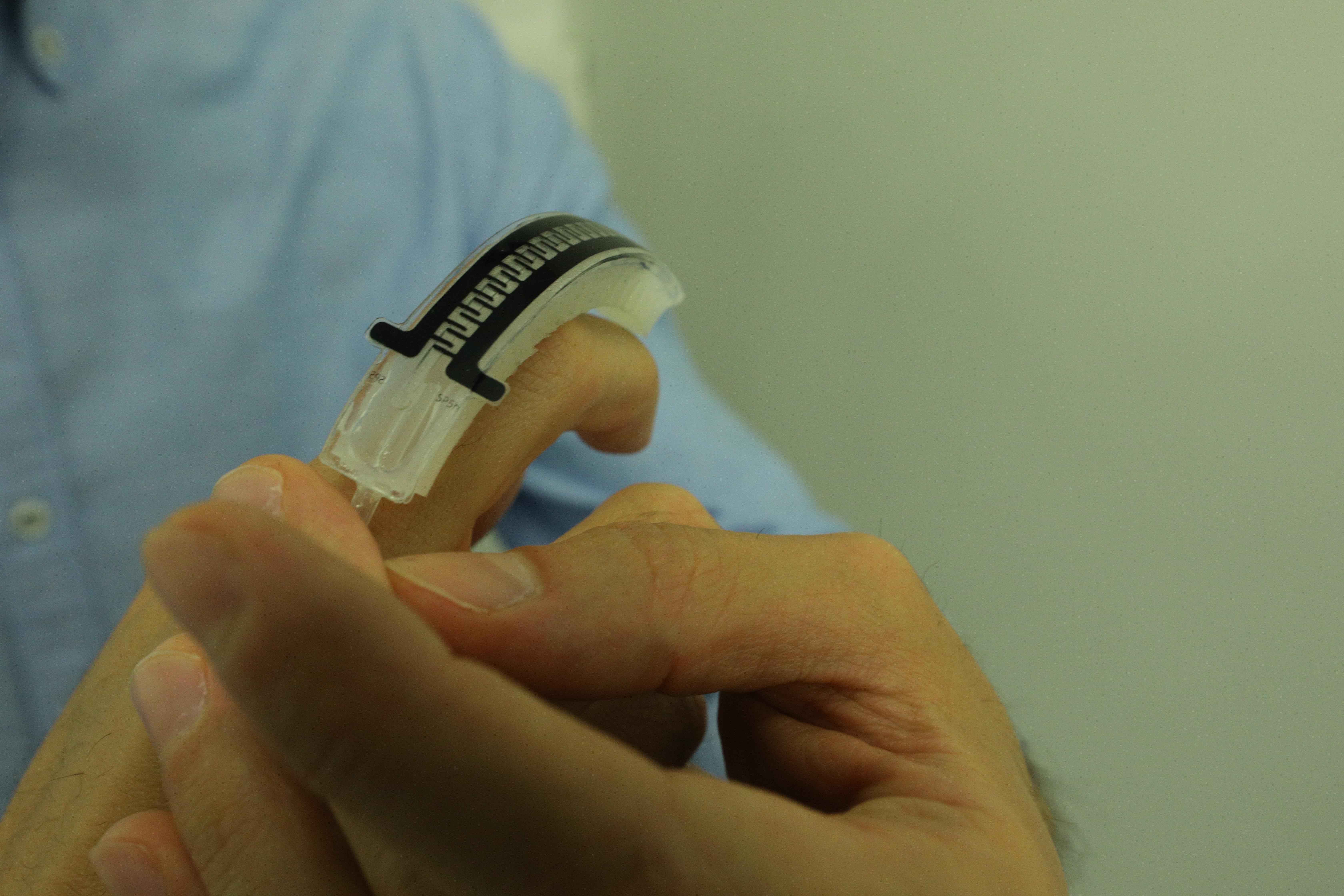
Les chercheurs ont déjà implanté avec succès leur pompe dans un type de doigt robotique largement utilisé dans les laboratoires de robotique souple. Ils collaborent à présent avec le Laboratoire de Koichi Suzumori au Japon, qui travaille sur le développement de muscles artificiels actionnés par des fluides, et sur des exosquelettes souples.

© Vito Cacucciolo / 2019 EPFL
En parallèle, ils ont équipé un gant en textile de tubes, et ont démontré que l’on pouvait chauffer ou refroidir des régions spécifiques du gant en utilisant la pompe. «Un peu comme le font les systèmes de chauffage et de refroidissement dans les habitations», illustre Vito Cacucciolo. Certaines entreprises ont par ailleurs déjà montré leur intérêt pour cette dernière application.
Dossier de presse
-----
Collaborations:
Shingo Maeda’s laboratory, Shibaura Institute of Technology, Tokyo, Japan
The University of Electro-Communications, 1-5-1 Chofugaoka, Chofu, 182-8585 Tokyo, Japan
JSPS KAKENHI; MEXT/JSPS under Leading Initiative for Excellent Young Researchers; Swiss National Science Foundation through NCCR Robotics; Japanese TOBITATE! Young Ambassador Program; and the Hasler Foundation Cyber-Human Systems program.
V. Cacucciolo, J. Shintake, Y. Kuwajima, S. Maeda, D. Floreano, H. Shea, “Stretchable pumps for soft machines,” Nature, doi: 10.1038/s41586-019-1479-6
Liens
Images à télécharger