The motorcycle of the future won't need a rider

© 2016 EPFL / Alain Herzog
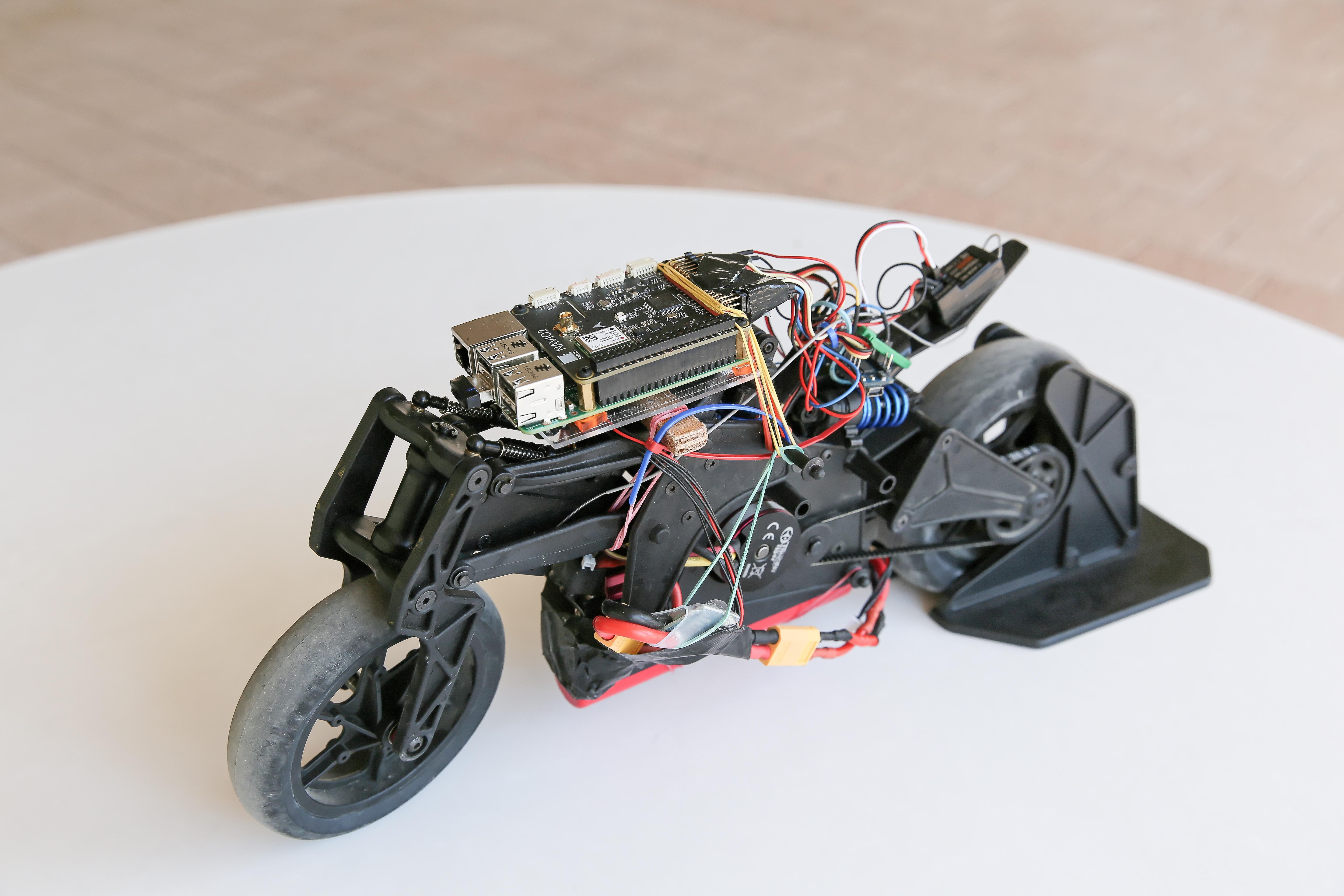
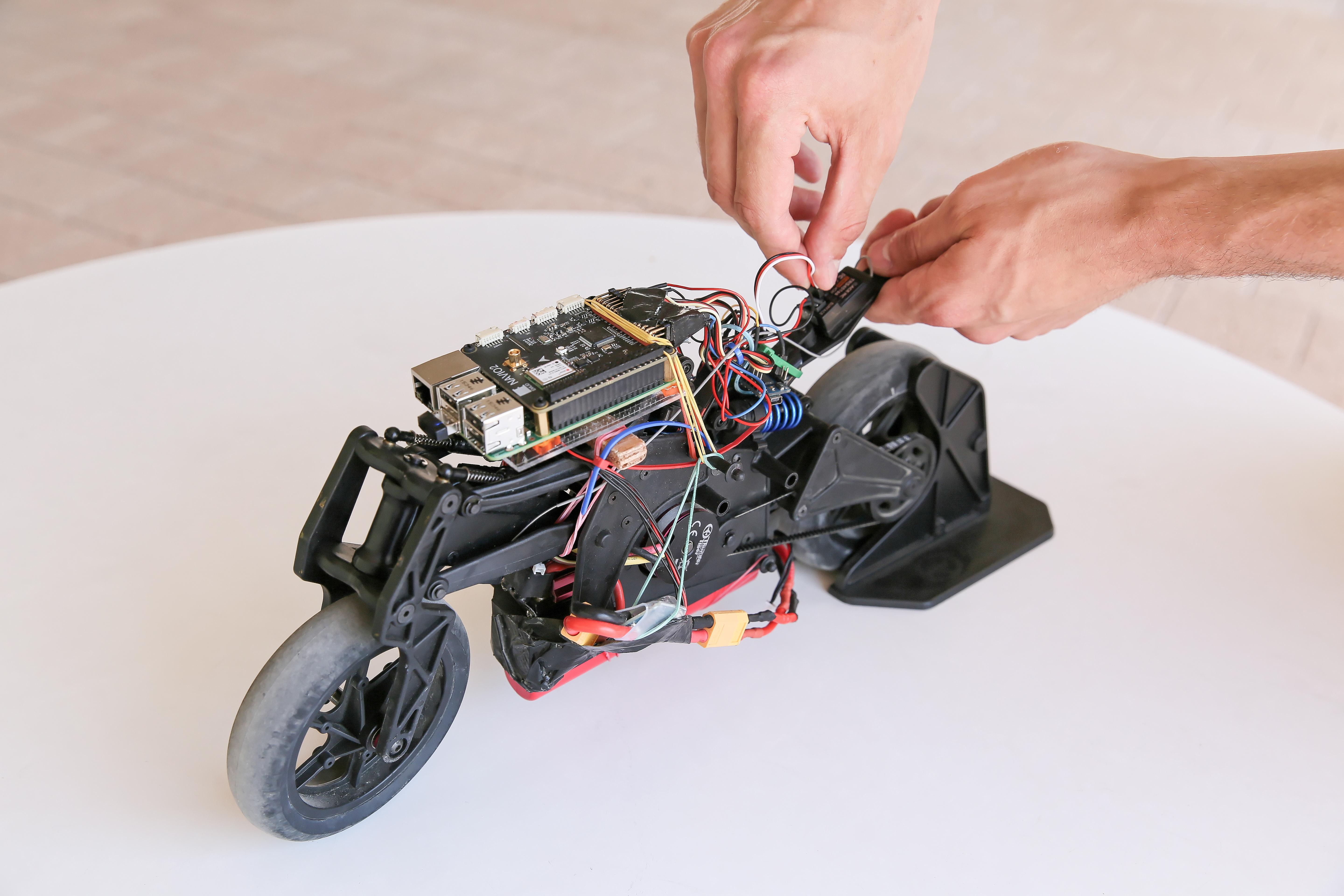
Microengineering student Eric Unnervik has developed a miniature self-balancing motorcycle. His aim is to one day produce an entirely autonomous motorcycle that can outperform human riders.
Are we about to see riderless motorcycles on the roads, like Google’s self-driving cars? Yes or no, the technology needed to develop autonomous motorcycles already exists. Eric Unnervik, a microengineering student at EPFL, has come up with a miniature version of this concept for his Master’s project, which he did in the Automatic Control Laboratory run by Professor Colin Jones.
With no human input other than being told where to go, Unnervik’s mini motorcycle is able to travel at a speed of 60 km/hour without falling – no mean feat. The days of the self-driving, GPS-guided motorcycle may be far off, but Unnervik has already overcome the main challenge of two-wheeled vehicles: keeping them upright. “Motorcycles fall as soon as they stop,” says Unnervik. “They must always maintain speed, and the only way to stabilize them is to use the steering angle, which is controlled by a servomotor.”
Onboard computer
Unnervik’s motorcycle is fitted with an actual computer – a credit-card-sized Raspberry Pi – and sensors that measure the motorcycle’s angle and speed. Thanks to a WiFi chip, the operator can start the computer from a smartphone and use a remote-control device to tell the motorcycle where to go. The computer makes all the necessary adjustments to ensure the motorcycle remains upright.
While this motorcycle still needs a little help from its operator, the Automatic Control Laboratory is already working on versions capable of following a predetermined route. Ultimately, they want the machine to outperform a human rider. “Our goal is that, in a race between an autonomous motorcycle and one ridden by a human, our machine wins,” says the student.
Images to download