Le robot qui retombe toujours sur ses pattes

© 2012 Alain Herzog
Construit pour explorer des zones confinées, des endroits encombrés ou dangereux, le robot volant «AirBurr» ne craint ni les collisions ni les chutes. Prenant le contre-pied de ses semblables, il cherche sciemment le contact et peut évoluer sans craindre l’accident.
Contrairement à d’autres robots volants qui tentent à tout prix d’éviter les obstacles, l’AirBurr est conçu pour supporter les chocs. Ses algorithmes de navigation, imaginés au laboratoire de systèmes intelligents de l’EPFL, lui permettent d’exploiter les collisions pour se déplacer. «Il y a 4 ans nous avions imaginé un robot volant capable d’esquiver les obstacles, explique Adam Klaptocz en charge du projet, mais dans un décor chaotique il n’était pas fiable et finissait toujours par toucher quelque chose, s’écraser et ne plus se relever.» Il a donc eu l’idée de changer d’approche. Le chercheur a imaginé un hélicoptère robuste et autonome, capable de rester en vol en cas de collision et de se redresser après une chute.
L’équipe du LIS vient de publier les résultats de ses recherches dans IEEE Transactions on Robotics.
300 grammes d’ingéniosité bio inspirée
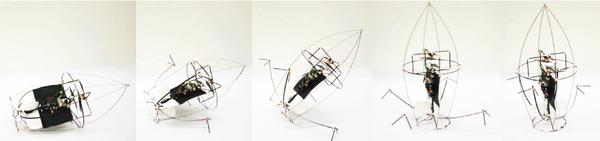
Comme un insecte à la recherche d’une ouverture dans la fenêtre, l’AirBurr trouve son chemin au contact de son environnement. Son fuselage en fibre de carbone, tel un exosquelette, protège ses parties vitales. Ses quatre pattes rétractables le sortent des situations les plus complexes, même coincé sous une table. Ses deux hélices installées sur le même axe lui permettent de bénéficier d’une meilleure poussée et de tourner sur lui-même. Grâce à ses accéléromètres et gyroscopes, il contrôle automatiquement son orientation. « On l’a automatisé au maximum précise Adrien Briod qui a travaillé sur les algorithmes, on lui donne des indications générales comme celle de se relever s’il est à terre mais il effectue seul la manœuvre de redressement.»
Braver les dangers sans éviter les obstacles
Les robots volants peuvent naviguer là où d’autres machines terrestres ne peuvent se rendre et sonder des zones dangereuses comme des bâtiments effondrés, des lieux irradiés, des grottes ou des mines, où le contact avec des obstacles est inévitable. On l’a vu lors de la catastrophe de Fukushima, les drones envoyés sur place étaient incapables de s’approcher et ne pouvaient récolter que des informations très parcellaires. La recherche autour de l’AirBurr s’est focalisée sur l'absorption des collisions, les moyens mécaniques pouvant l’aider à sortir d'endroits difficiles, et le développement d’algorithmes de navigation basés sur le contact avec des objets.
Le prototype pourra évoluer selon les besoins. En effet, suivant les missions, il faudra adapter la plateforme de l’AirBurr pour lui permettre d’évoluer dans des conditions extrêmes au contact de l’eau, de la chaleur ou des radiations. Pour l’heure les ingénieurs travaillent déjà sur une version améliorée.
http://lis.epfl.ch/airburr
http://www.ieee-ras.org/tro.
http://ieeexplore.ieee.org/xpl/articleDetails.jsp?tp=&arnumber=6213136