Des robots-fourmis qui sautent, communiquent et agissent ensemble

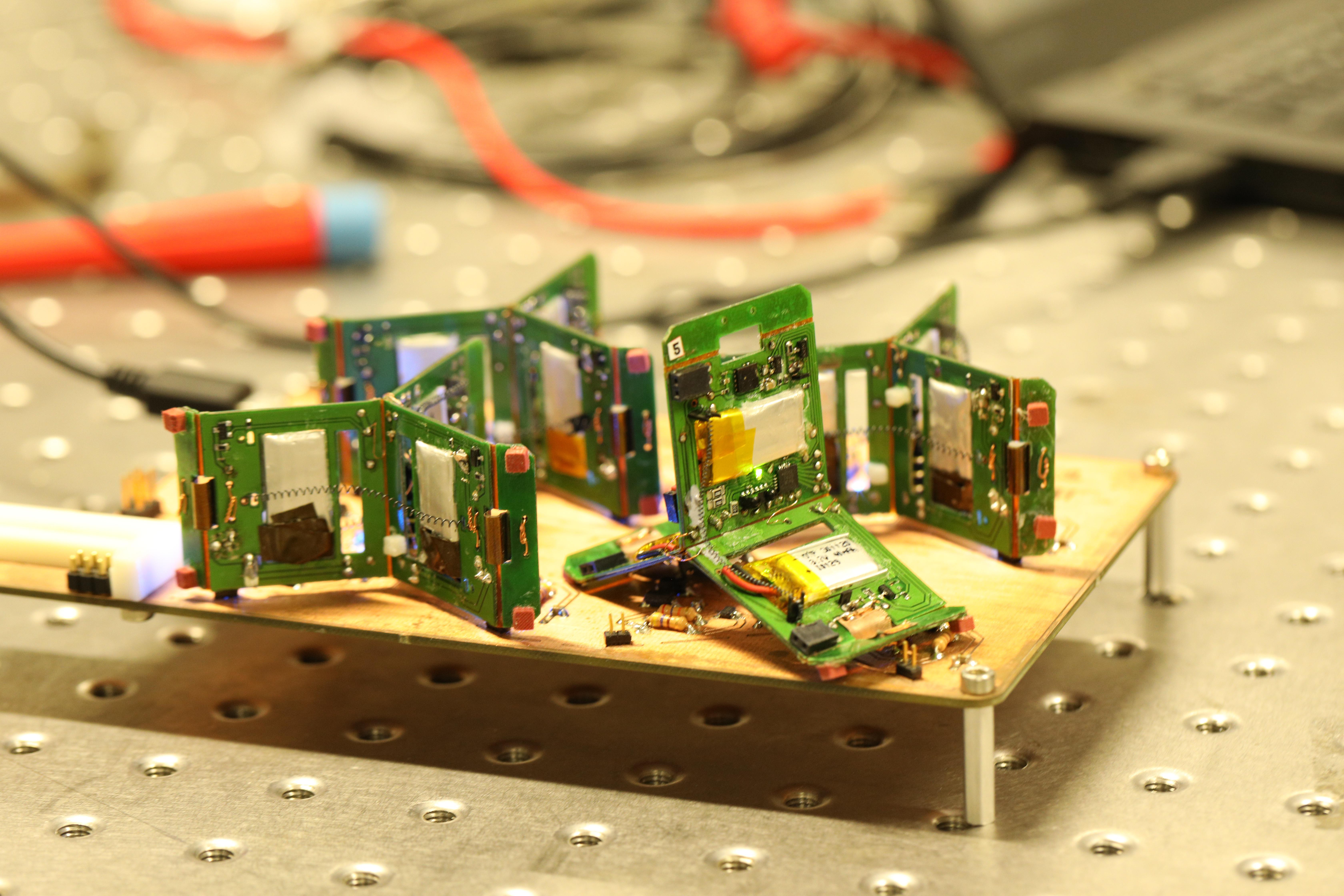
Un tribot saute vers l'avant ©Zhenishbek Zhakypov / 2019 EPFL
Inspirés des fourmis, de petits robots de 10 grammes développés à l’EPFL peuvent communiquer entre eux, s’attribuer différents rôles et réaliser ensemble des tâches complexes. Dotées d’une structure simple, ces machines reconfigurables sont capables de sauter et ramper pour se déplacer sur des surfaces accidentées. La recherche est publiée dans Nature.
Une fourmi seule et isolée ne présente pas une intelligence hors-nome. Au sein d’une colonie, en revanche, les individus sont capables d’élaborer des stratégies complexes et de réaliser des tâches sophistiquées pour survivre aux attaques de prédateurs plus imposants.
A l’EPFL, les roboticiens du Laboratoire de Jamie Paik ont reproduit ce phénomène, et développé de petits robots à l’intelligence physique minimaliste, mais qui sont capables de communiquer et d’agir collectivement. Malgré un design simple et un poids de seulement 10 grammes, chaque robot dispose de plusieurs modes de locomotion, ce qui lui permet d’évoluer sur tous les types de terrain. Ensemble, les petites machines peuvent détecter rapidement les obstacles, les franchir, et déplacer des objets bien plus imposants et lourds qu’elles. La recherche fait l’objet d’une publication dans Nature.

(Photo: Marc Delachaux / EPFL)
Des fourmis qui claquent des mandibules
Fabriqués en forme de T, ces -robots origami sont appelés Tribot. Ils sont assemblés en quelques minutes par pliage de feuilles légères en multi-matériaux, ce qui en fait de bons candidats pour une production de masse. Autonomes et sans fils, les Tribots sont munis de capteurs infrarouge et de capteurs de proximité, pour la communication et la détection. Selon les applications, d’autres capteurs pourrait être facilement intégrés.
«Leurs déplacements sont calqués sur ceux des fourmis Odontomachus. Ces dernières se déplacent en marchant, mais pour échapper aux prédateurs, elles font claquer leurs puissantes mandibules pour sauter de feuille en feuille», explique Zhenishbek Zhakypov, premier auteur de la publication. «Nos Tribots répliquent ce mécanisme en catapulte, grâce à une conception habile en origami, qui mêle de multiples actuateurs en alliages à mémoire de forme.» Un même robot pourra ainsi se déplacer selon cinq modes de locomotion. Il est capable de sauter horizontalement, verticalement ou en exécutant des saltos pour surmonter un obstacle, mais aussi de marcher sur des terrains avec relief, ou de ramper sur des surfaces planes.
(Zhenishbek Zhakypov et Jamie Paik. Photo: Marc Delachaux / EPFL)
Les rôles : le meneur, l’ouvrier ou l’explorateur
Bien qu’ayant la même anatomie, chaque robot peut endosser un rôle spécifique, selon le contexte. L’explorateur, par exemple, détecte les obstacles physiques sur le chemin, tels que des objets, des vallées ou des montagnes, et en informe toute la troupe. Le robot-meneur donne quant à lui les instructions exécutives. Et les ouvriers mettent leurs forces en commun pour déplacer un objet. «Tout comme les fourmis Odontomachus, chaque Tribot peut prendre des rôles différents, et peut changer de rôle instantanément dans un environnement inconnu, lorsque la mission est nouvelle ou si d’autres membres sont perdus», explique Jamie Paik. «Cela va au-delà de ce que la nature peut faire.»
Un déploiement en masse
Sur le terrain, en cas de mission de recherche dans des situations d’urgence, les Tribots pourraient être déployés en masse. Grâce à leurs qualités multi-locomotrices et leurs capacités de communication, ils pourraient repérer une cible de manière très rapide, sans recourir à un GPS, ni utiliser de feedback visuel. «Comme les robots peuvent être déployés en très grand nombre, la perte d’un ou de plusieurs robots durant l’action n’affecterait pas le succès de la mission», ajoute la chercheuse.
«Nous pensons que nos robots présentent une intelligence collective unique. Ils démontrent une excellente capacité d’adaptation à des environnements inconnus. Ainsi, pour certaines missions, ils pourraient être plus efficaces que des robots plus puissants et plus volumineux.»
La recherche a été menée en collaboration avec l'Université d'Osaka.

En avril 2019, Jamie Paik a présenté ses recherches et ses robots reconfigurables lors de la prestigieuse conférence TED à Vancouver. Sa conférence est à présent disponible ici: https://go.ted.com/jamiepaik (Photo: Bret Hartman / TED)
Zhenishbek Zhakypov, Kazuaki Mori, Koh Hosoda and Jamie Paik, Designing Minimal and Scalable Insect-Inspired Multi-Locomotion Millirobots, Nature, DOI 10.1038/s41586-019-1388-8
Images à télécharger