DeepFly3D: l'IA pour concevoir des robots-mouches

Concept design of fly-robots. Copyright: P. Ramdya, EPFL
Des chercheurs de l’EPFL modélisent en 3D les mouvements de la mouche grâce à leur logiciel de capture d’images, basé sur le deep learning et plusieurs caméras. Ils comptent utiliser ces résultats pour concevoir des robots inspirés de l’insecte.
“Pensez seulement à ce qu’une mouche est capable de faire”, explique Pavan Ramdya, qui a dirigé l’étude depuis son laboratoire du Brain Mind Institute de l’EPFL, en collaboration avec le laboratoire du professeur Pascal Fua de l’Institut des sciences de l’informatique. “Une mouche peut escalader des terrains inaccessibles à un robot muni de roues.”
Les mouches n’inspirent pas vraiment l’affection des humains. A raison, nous les associons à de peu ragoûtantes expériences du quotidien. Mais un chemin de rédemption inattendu s’ouvre pour ces insectes: les robots. Il s’avère que les mouches présentent quelques caractéristiques et aptitudes à même d’inspirer de nouveaux concepts en systèmes robotiques.
“Contrairement à la plupart des vertébrés, les mouches peuvent grimper sur à peu près n’importe quel terrain”, explique Pavan Ramdya. “Elles peuvent s’accrocher aux murs et aux plafonds grâce à l’extrémité de leurs pattes, munie de griffes et de coussinets adhésifs. Cela leur permet d’aller presque partout. C’est également intéressant pour une autre raison: si vous pouvez vous reposer sur n’importe quelle surface, vous pouvez gérer vos dépenses énergétiques en attendant le meilleur moment pour agir.”
Exploiter les principes du comportement de la mouche pour concevoir des robots: cette idée est à l’origine de DeepFly3D. Ce système de capture d’images est dédié à la mouche Drosophila melanogaster, un organisme modèle utilisé de manière quasi universelle en biologie.
Dans le dispositif expérimental de Pavan Ramdya, le diptère se promène sur une petite balle flottante – une sorte de tapis roulant miniature – tandis que sept caméras enregistrent chacun de ses mouvements. Le côté supérieur de la mouche est collé à un élément fixe, de sorte qu’elle reste toujours au même endroit tout en marchant sur la balle. Malgré tout, elle reste “persuadée” qu’elle avance librement.
DeepFly3D traite ensuite les images. Ce logiciel de deep learning – une forme d’intelligence artificielle – a été développé par Semih Günel, doctorant aux laboratoires de Pavan Ramdya et Pascal Fua. “Ce cas illustre parfaitement des situations où la collaboration interdisciplinaire est nécessaire et transformative”, commente Pavan Ramdya. “En exploitant les sciences de l’informatique et les neurosciences, nous avons pu relever un défi qui résistait de longue date.”
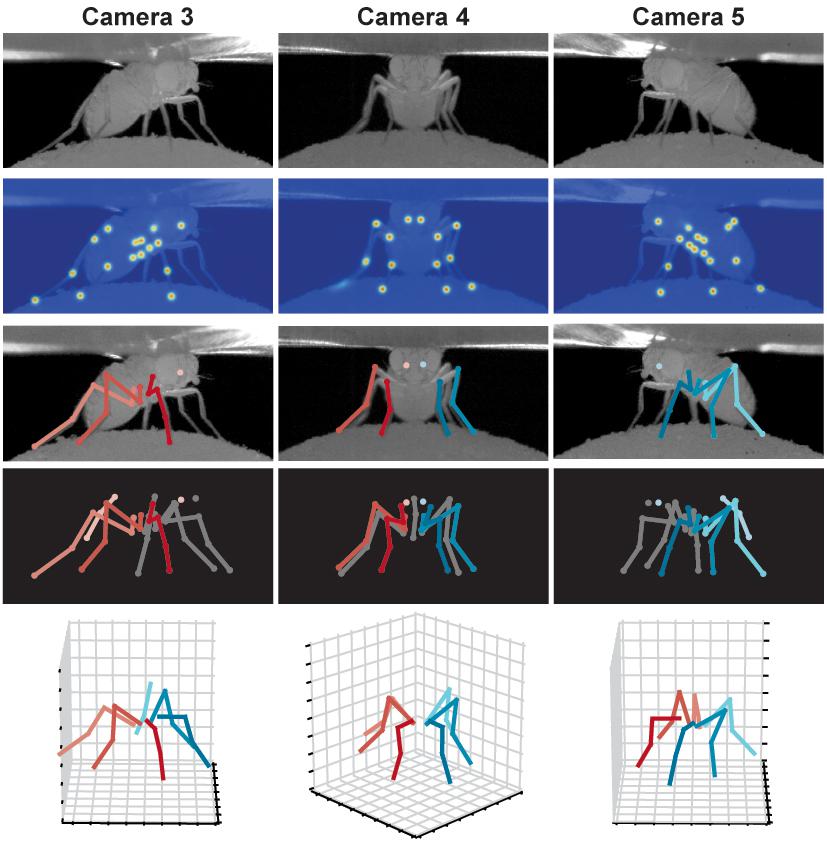
Diverses postures de la mouche du vinaigre Drosophila melanogaster, capturées par de multiples caméras et traitées par le logiciel DeepFly3D. Crédit: P. Ramdya, EPFL.
DeepFly3D se distingue par sa faculté à déduire la position de la mouche – ou d’autres animaux – en trois dimensions. En d’autres termes, il peut automatiquement effectuer des prédictions et des mesures comportementales à une résolution inédite, pour une foule d’applications en biologie. Le programme n’exige pas de calibrage manuel. Il exploite les images des caméras pour repérer et corriger automatiquement ses propres erreurs lorsqu’il calcule la posture de la mouche. Enfin, il améliore ses propres performances grâce à l’intelligence artificielle.
DeepFly3D permet de modéliser en trois dimensions, de manière efficace et précise, les mouvements, les postures et l’angle des articulations de la mouche du vinaigre. Il pourrait inspirer de nouveaux standards pour modéliser en trois dimensions la posture d’autres organismes.
“En tant qu’organisme modèle, la mouche présente un bon compromis entre docilité et complexité”, explique Pavan Ramdya. “Si nous comprenons comment elle accomplit ses actions, nous pourrons apporter une importante contribution à la robotique et à la médecine. Et de manière peut-être plus importante, nous pourrons acquérir ces connaissances en un laps de temps relativement court.”
Microsoft (JRC project), Fonds national suisse de la recherche scientifique (Eccellenza grant), EPFL (iPhD grant), Swiss Government Excellence Postdoctoral Scholarship
Semih Günel, Helge Rhodin, Daniel Morales, João H. Campagnolo, Pavan Ramdya, Pascal Fua. DeepFly3D, a deep learning-based approach for 3D limb and appendage tracking in tethered, adult Drosophila. eLife 04 October 2019;8:e48571. DOI: 10.7554/eLife.48571