Connaître la position exacte de sa prothèse les yeux fermés

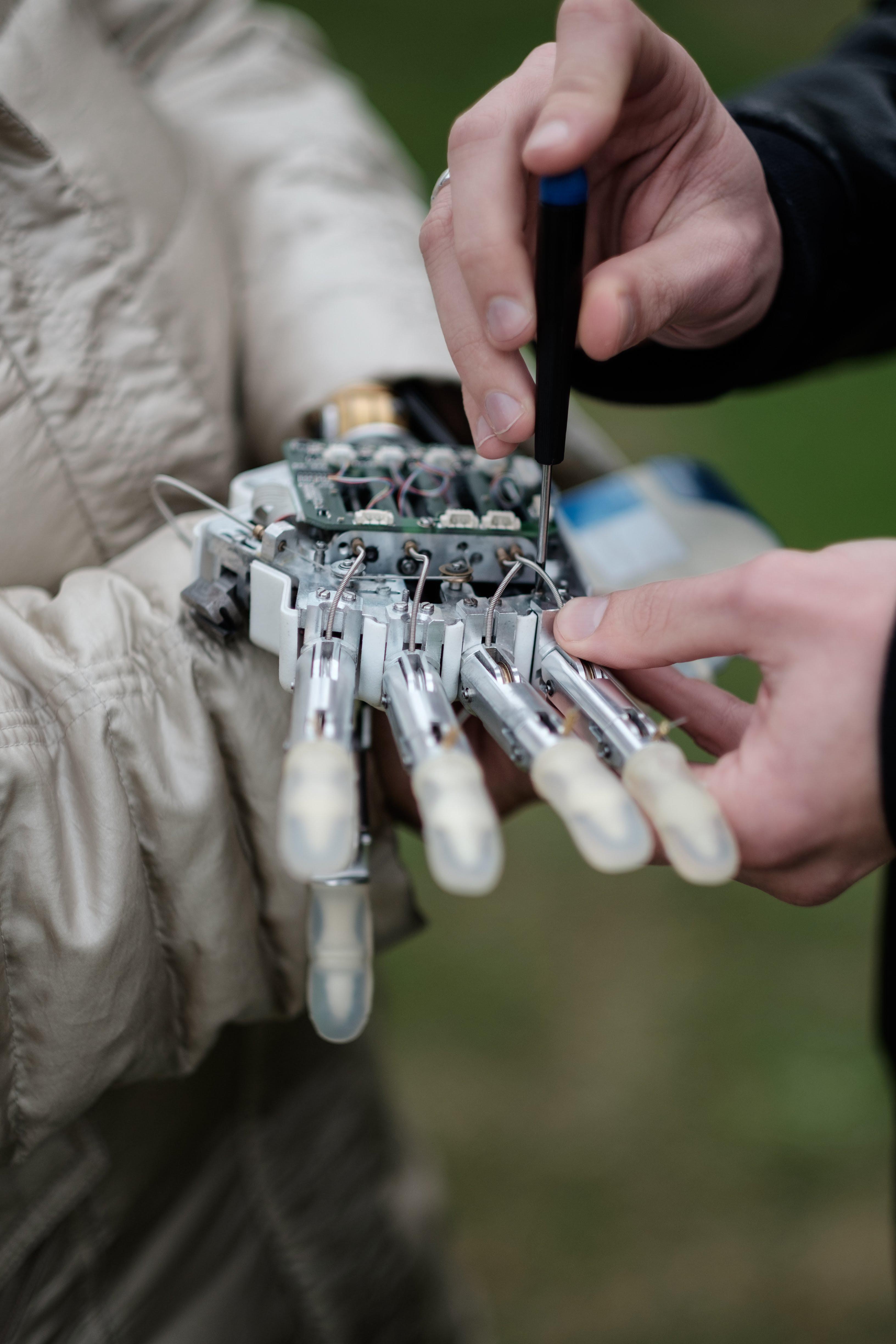
©Luca Rossini
Une prothèse de main robotique nouvelle génération permet de recréer la sensation de proprioception chez le patient amputé. Les résultats de cette recherche, présentés dans la revue Science Robotics, couronnent dix années d’expérience scientifique dans le domaine de la robotique.
Développée par des chercheurs de l’EPFL, de la Scuola Superiore Sant'Anna de Pise, et de l'A. Gemelli Policlinico IRCCS - Fondazione Università Cattolica di Roma, une prothèse de main robotique de nouvelle génération permet de redonner au patient amputé des sensations très subtiles se rapprochant de la réalité. En particulier, ils ont réussi à reproduire le sentiment de "proprioception", soit la capacité de notre cerveau à connaître instantanément et de manière précise la position dans l’espace de la main et des doigts, pendant et après leur utilisation (même dans le noir ou avec les yeux fermés).
Le nouveau dispositif permet par exemple de partir à la recherche d'un objet sur une table, de percevoir la consistance, la forme, la position et la taille des objets, le tout sans avoir à regarder. Testée sur plusieurs patients avec succès, la prothèse stimule les nerfs résiduels de la partie restante du membre, ce qui permet de donner un feedback sensoriel aux patients en temps réel - d'une manière comparable à ceux d’une main naturelle. Les résultats de cette recherche ont été publiés dans la revue Science Robotics.
Cette publication est le fruit de dix années de recherche scientifique, coordonnée par Silvestro Micera, professeur de bioingénierie à l’EPFL et à la Scuola Superiore Sant'Anna, et par Paolo Maria Rossini, directeur du domaine des neurosciences de la A. Gemelli Policlinico, IRCCS - Fondation de l’Université catholique de Rome.
Retour sensoriel
Actuellement, les prothèses myoélectriques permettent aux personnes amputées de récupérer le contrôle moteur volontaire de leur membre artificiel, en exploitant la fonction musculaire restante de l'avant-bras. Cependant, l’absence de retour sensoriel conduit à une dépendance excessive à la vue, ce qui rend difficile la perception de la main bionique comme faisant partie intégrante de son corps, et rend son utilisation moins naturelle.
Récemment, plusieurs groupes de chercheurs ont réussi à fournir une rétroaction tactile chez des patients amputés, améliorant à la fois l'utilisation et le sentiment d'appartenance des prothèses. Aujourd’hui, un nouveau pas vient d’être franchi.
"Dans notre étude, explique Silvestro Micera, nous avons montré que la substitution sensorielle basée sur la «stimulation intraneurale» est capable de fournir un retour proprioceptif en temps réel et en combinaison avec un retour tactile sensoriel. Le cerveau peut facilement combiner les informations, et les patients peuvent les utiliser en temps réel avec d’excellentes performances. "
Avec la stimulation intraneurale, le flux normal d'informations provenant de l'extérieur est rétabli par des impulsions électriques envoyées par des électrodes insérées directement dans les nerfs du membre supérieur amputé. Après une formation spécifique, le patient apprend progressivement à traduire ces impulsions en sensations tactiles et proprioceptives.
Cette approche a permis à deux sujets amputés de retrouver une «acuité proprioceptive» élevée, avec des résultats comparables à ceux obtenus chez des sujets en bonne santé. La présence simultanée de réactions proprioceptives et tactiles a permis aux deux personnes amputées de déterminer la taille et la forme de quatre objets avec un niveau de précision important (75,5%).
"Ces résultats montrent que les personnes amputées peuvent exploiter efficacement les informations tactiles et proprioceptives fournies simultanément par la stimulation intraneurale", commente Edoardo D'Anna, premier auteur de l'étude et chercheur à l'EPFL.
Autres contributions :
La recherche a bénéficié de la contribution d'autres centres de recherche européens prestigieux tels que les universités de Cagliari, Montpellier et Fribourg (Allemagne) et du financement ultérieur de la Commission européenne, du Centre de compétences en robotique suisse (NCCR Robotics), de la Fondation Bertarelli.
E. D’Anna, G. Valle, A. Mazzoni, I. Strauss, F. Iberite, J. Patton, F. Petrini, S. Raspopovic, G. Granata, R. Di Iorio, M. Controzzi, C. Cipriani, T. Stieglitz, P. M. Rossini, and S. Micera, A closed-loop hand prosthesis with simultaneous intraneural tactile and position feedback, Science Robotics
Liens
Images à télécharger