Un patient amputé ressent des textures avec un doigt bionique

© 2016 EPFL
Une personne amputée perçoit des textures rugueuses ou lisses en temps réel, avec sa main fantôme, au moyen d’un bout de doigt artificiel connecté à des nerfs du bras. Cette avancée va accélérer le développement du sens du toucher en prosthétique.
Une personne amputée a pu percevoir des textures lisses et rugueuses en temps réel avec un bout de doigt artificiel connecté chirurgicalement à des nerfs dans la partie supérieure de son bras. De plus, les nerfs de personnes non-amputées peuvent être stimulés de la même manière pour sentir de la rugosité, sans recours à la chirurgie, ce qui signifie que le toucher prosthétique pour les personnes amputées peut être développé et testé en toute sécurité sur des personnes valides.
La technologie utilisée pour délivrer cette information tactile sophistiquée a été développée par Silvestro Micera et son équipe à l’EPFL (Suisse) et à la SSSA (Italie), en collaboration avec Calogero Oddo et son équipe à la SSSA. Les résultats, publiés aujourd’hui dans eLife, ouvrent des perspectives nouvelles en vue du développement de prothèses bioniques, améliorées grâce à un perception sensorielle.
«La stimulation avait presque le même effet que ce que je ressentirais avec ma main», explique Dennis Aabo Sørensen, amputé d’une main, à propos du doigt artificiel connecté à son moignon. Il poursuit: «Je sens encore ma main manquante comme si j’avais le poing fermé. J’ai ressenti les sensations de texture au bout de l’index de ma main fantôme.»

Sørensen est la première personne au monde à reconnaître une texture au moyen d’un bout de doigt bionique connecté à des électrodes implantées chirurgicalement au-dessus de son moignon.
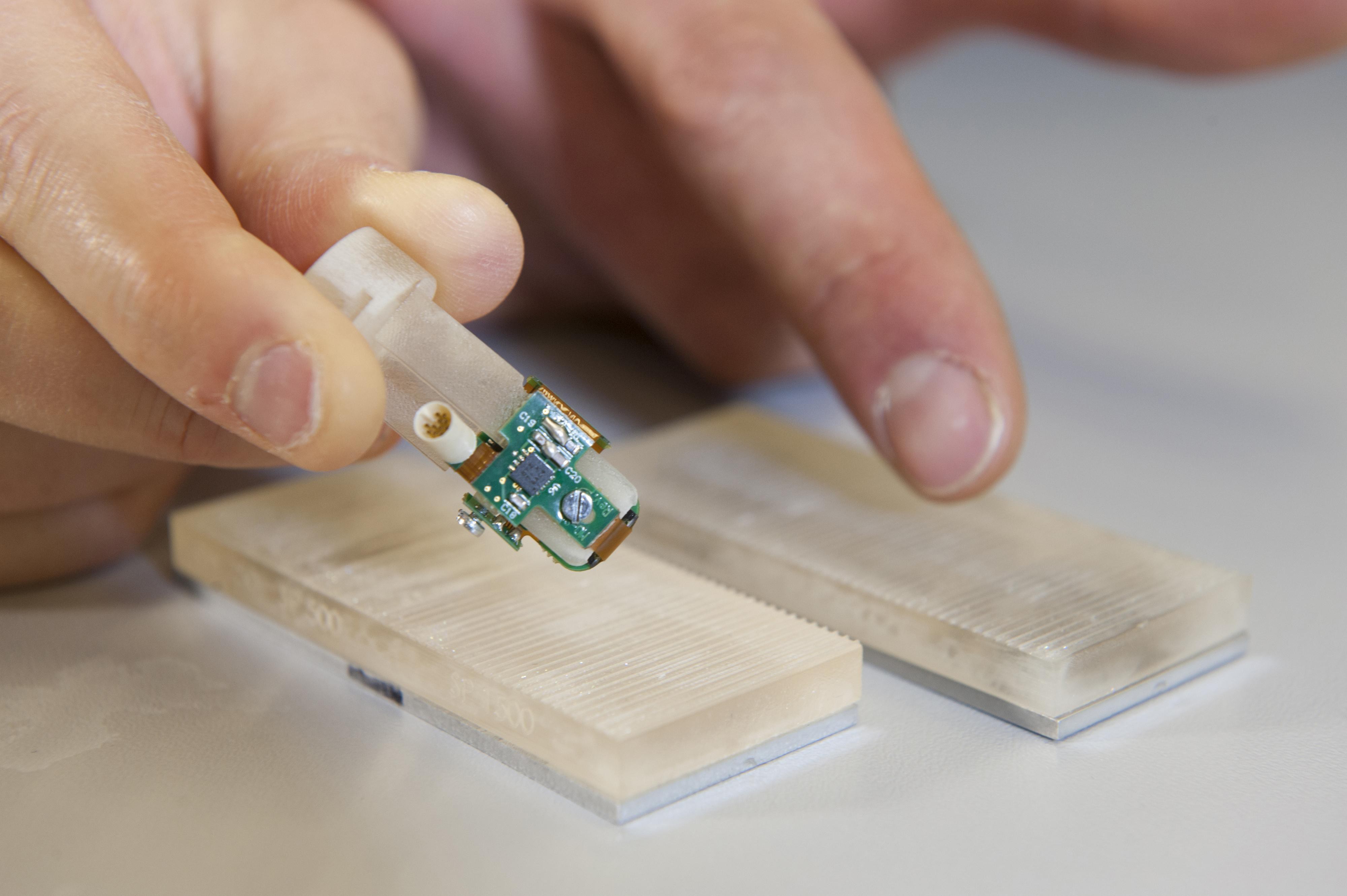
Dans le bras de Sørensen, les nerfs ont été connectés à un bout de doigt artificiel équipé de capteurs. Une machine contrôlait les mouvements du bout de doigt sur différents morceaux de plastique sur lesquels des lignes lisses ou rugueuses étaient gravées. Lorsque le bout de doigt se déplaçait sur la texture du plastique, les capteurs généraient un signal électrique. Ce signal a été traduit en une série de pics électriques imitant le langage du système nerveux, puis dirigé vers les nerfs.
Sørensen a été capables de distinguer des surfaces rugueuses et lisses 96% du temps.

Dans une étude précédente, les implants de Sørensen avaient été connectés à une main prosthétique enrichie de capteurs qui lui ont permis de reconnaître les formes et la douceur. Dans la nouvelle publication du journal eLife sur les textures, le bout de doigt bionique atteint un niveau supérieur de résolution tactile.
Simuler le toucher chez des personnes non-amputées
Cette même expérience concernant la rugosité a été appliquée à des personnes non-amputées, sans devoir recourir à la chirurgie. L’information tactile était transmise au moyen de fines aiguilles microneurographiques implantées temporairement dans le nerf médian du bras à travers la peau. Les personnes non-amputées ont été capables de distinguer la rugosité d’une texture 77% du temps.
Mais l’information tactile provenant d’un bout de doigt bionique ressemble-t-elle vraiment au toucher d’un doigt réel ? Pour le savoir, les scientifiques ont comparé l’activité cérébrale des personnes non-amputées lorsqu’elles utilisaient le bout de doigt artificiel par rapport à leurs propres doigts.
Les données cérébrales recueillies par une coiffe d’électrodes fixée sur la tête des sujets a révélé que les régions activées dans le cerveau étaient les mêmes.
L’étude démontre que les aiguilles transmettent l’information sur les textures de la même manière que les électrodes implantées, ce qui fournit aux scientifiques les moyens d’accélérer de nouveaux protocoles pour améliorer la résolution tactile en prosthétique.
«Cette étude rassemble les sciences fondamentales et l’ingénierie appliquée: elle apporte une nouvelle preuve que la recherche en neuroprosthétique peut contribuer au débat sur la neuroscience, spécifiquement en ce qui concerne les mécanismes neuronaux du sens du toucher humain», dit Calogero Oddo. «Elle sera aussi traduite pour d’autres applications telles que le toucher artificiel dans la robotique, que ce soit dans le domaine de la chirurgie, dans celui des secours, ou encore de la production de biens.»
Cette étude a été conduite par l’EPFL et la SSSA en collaboration avec l’Université de Pise, l’IRCCS San Raffaele Pisa, l’Università Cattolica del Sacro Cuore, l’Università Campus Biomedico.
Ce travail a été réalisé en partie avec le soutien du programme de subventionnement de la Commission Européenne TIME, NEBIAS et NANOBIOTOUCH, par les subventions italiens NEMESIS (financé par le ministère italien de la santé), PRIN/HandBot (financé par le ministère italien de la recherche), et PPR2 (financé par l’Institut national d’assurance contre les accidents du travail), par le projet ENABLE financé par le Centre Wyss pour la Bio et Neuro-ingénierie, et par le NCCR robotics en Suisse.
Images à télécharger