Lorsque le patient éduque sa prothèse

© 2015 EPFL
Alors qu'il faut beaucoup de temps pour apprendre à contrôler les neuroprothèses, une recherche de José del R. Millán, publiée dans Nature Scientific Reports, permettra de créer une nouvelle génération d'interfaces cerveau-machine facile d'utilisation et capable d'apprendre de ses erreurs.
Les Brain-Machines Interfaces (BMI ou interfaces cerveau-machine) constituent un grand espoir pour des milliers de patients affectées par les maux les plus divers: amputées ou encore paralysées. Les patients équipés de ces équipements peuvent contrôler un membre artificiel grâce à des électrodes connectées - directement ou de façon non-invasive- au cerveau. Dans un article paru aujourd'hui dans Nature Scientific Reports, José Millán, titulaire de la Chaire Defitech en interfaces cerveau-machine, décrit l'application d'une technologie innovante qui pourrait permettre le développement d'une nouvelle génération de BMI non-invasives.
La plupart des BMI fonctionnent en interprétant les variations de l'activité électrique du cerveau, notamment par le biais d'un électroencéphalogramme. Pour être efficace, une telle méthode requiert un entraînement important de la part des patients. Ils doivent réussir à communiquer des informations désirées (par exemple : «tendre le bras gauche») en modulant leur activité cérébrale. Les résultats sont encourageants mais butent sur deux limites. Les patients doivent passer beaucoup de temps pour apprendre à manier leur neuroprothèse et, malgré cet entraînement, ne sont pas capables de réaliser certains mouvements complexes.
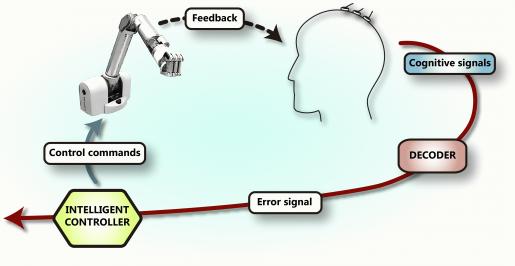
Un « signal d'erreur »
Lorsque l'on manque une marche le cerveau émet une impulsion électrique signifiant l'échec de l'action. Ce signal est nommé Error-related potential (ErrP). José Millán, dont le travail séminal dans le domaine des BMI a été salué par revue la Science, exploite ce signal pour développer une nouvelle génération de neuroprothèses. «Grâce à l'ErrP, c'est la machine elle-même qui va apprendre à réaliser les mouvements adéquats.» Le professeur de l'EPFL qualifie cette innovation de «changement de paradigme».
La détection de ce « signal d'erreur » a permis à l'équipe de José Millán de créer une nouvelle génération de neuroprothèse. Celle-ci est capable d'apprendre les mouvements appropriés en se basant sur l'ErrP.
Par exemple, si l'on échoue à saisir un verre d'eau posé devant soi, la neuroprothèse pourrait comprendre que l'action entreprise n'a pas abouti et va modifier les prochain mouvements en conséquence, jusqu'à obtenir le résultat désiré. La machine sait que l'objectif est atteint lorsque l'action effectuée ne génère pas d'ErrP.
L'avancée scientifique réside donc dans l'utilisation de ces signaux pour décharger le patient de la tâche fastidieuse de l'apprentissage. Cette nouvelle approche pourrait être à l'origine d'une nouvelle génération de prothèses intelligentes, capable d'apprendre une vaste palette de mouvements. En effet, en se basant sur les ErrP, il est théoriquement possible d'apprendre et de maitriser assez rapidement une multitude de mouvements moteurs, même les plus complexes.
25 minutes pour entraîner son détecteur
Les douze sujets de l'expérience ont d'abord du entrainer leur prothèse à détecter les ErrP. Equipés d'un casque à électrodes, ils ont observés la machine, programmée pour échouer dans 20% des cas, effectuer 350 mouvements distincts. Le réglage du détecteur d'ErrP a duré en moyenne 25 minutes. Une fois cette première étape accomplie, les cobayes ont réalisés trois expériences pour évaluer l'efficacité de cette nouvelle approche. Dans la dernière, les sujets devaient désigner une cible précise en utilisant un bras robotique placé à deux mètres de distance. Dans les trois cas, la neuroprothèse a démontré des capacités d'apprentissage intéressantes en adaptant continuellement ses actions et en gagnant en précision au fur et à mesure.
En effet, le bras artificiel mémorise les mouvements corrects et se constitue une base de données de plus en plus large d'actions. Cette capacité pourrait être particulièrement utile aux personnes atteintes de maladies neurodégenératives, en leur permettant de palier de façon quasiment organique la perte de fonction motrices. «Selon nos anticipations, cette nouvelle approche va devenir un élément clef des prochaines générations d'interfaces cerveau-machine qui imitent le contrôle moteur naturel. La prothèse peut s'adapter en continue même si elle ne dispose pas d'informations claires sur l'objectif.», conclu José Millán.
Cette recherche a été menée en partenariat avec le Département d'Informatique des systèmes de l'Institut aragonais de recherche en ingénierie de l'université de Saragosse (Espagne), Luis Montesano, Javier Minguez. Outre José Millán, Iñaki Iturrate et Ricardo Chavarriaga, du centre des neuroprothèses et de l'institut de Bioingéniérie de l'EPFL, ont également participé à ce projet.