Les robots à six pattes plus rapides que ce qu'offre la nature

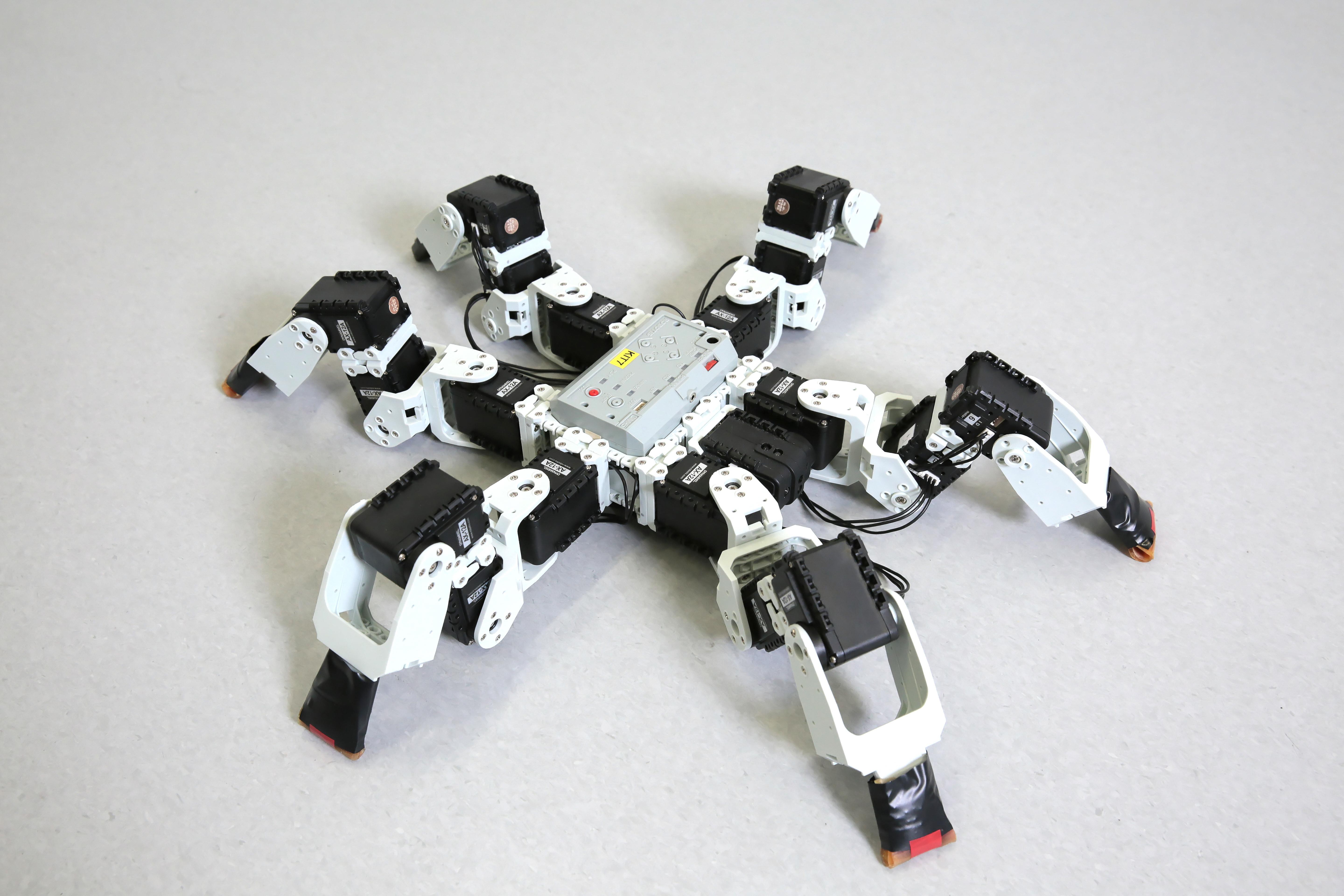
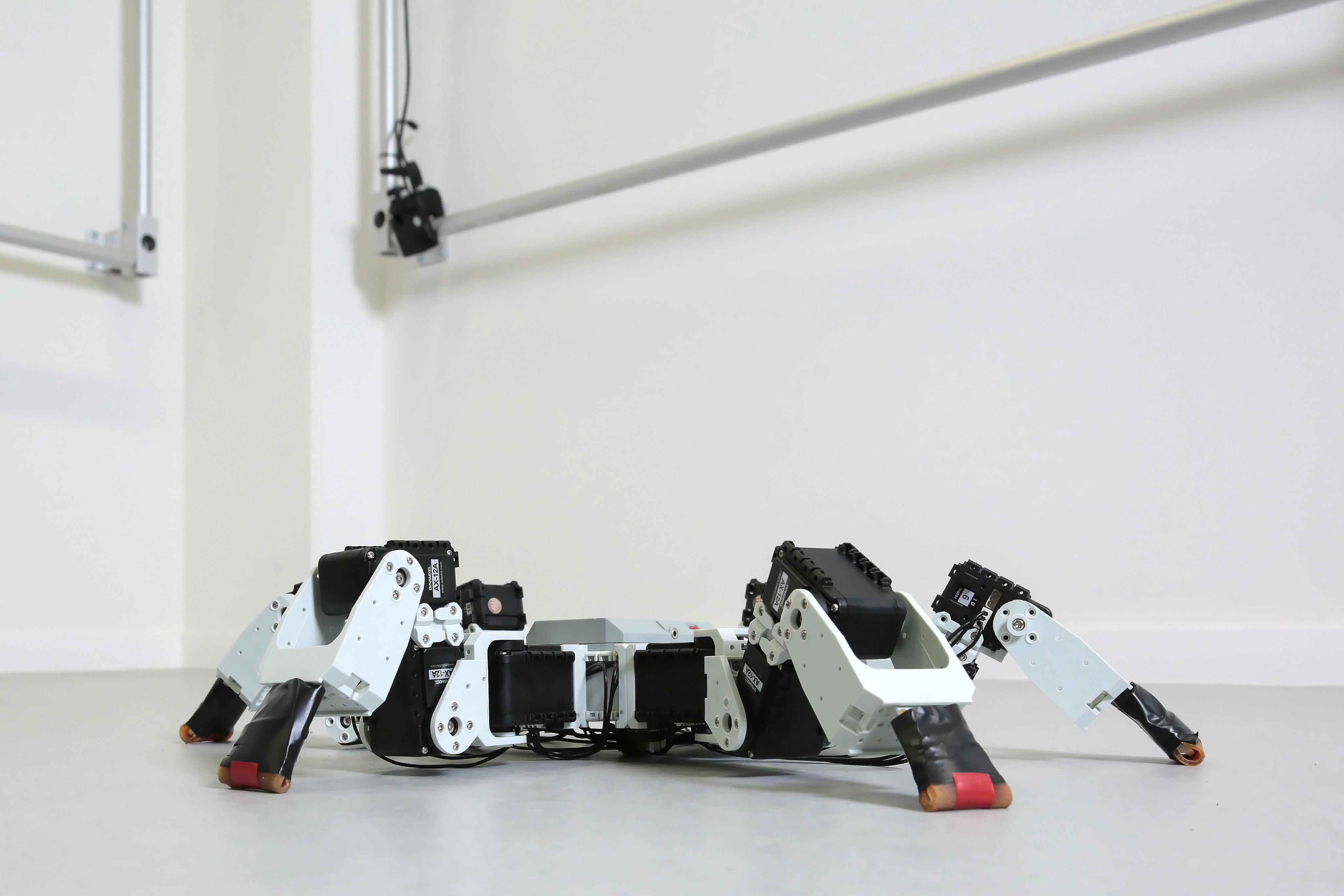
Un moyen plus rapide de faire avancer les robots à six pattes© Alain Herzog/2017 EPFL
Des chercheurs de l’EPFL et de l’UNIL ont découvert un moyen de faire avancer plus rapidement et plus efficacement les robots hexapodes, sur sol plat. La démarche traditionnelle, inspirée des insectes, est moins efficace pour les robots. Les insectes l’utilisent en raison de leurs pattes adhésives, pour un déplacement en trois dimensions. La recherche apporte un éclairage tant pour les biologistes que pour les roboticiens.
Pour se déplacer rapidement, la plupart des vertébrés adoptent un mode de course, dans lequel leurs membres ont un contact minimal avec le sol. Il en va tout autrement des insectes. Dotés de six pattes, ils se déplacent selon une marche à trois pattes, avec deux points d’appui d’un côté, et un point d’appui de l’autre. Un déplacement «en trépied», qui implique un triple contact au sol. Depuis de nombreuses années, les ingénieurs s’inspirent de cette démarche pour contrôler le déplacement de robots hexapodes. Mais est-ce la solution la plus rapide pour les robots bio-inspirés, lorsque la surface est plane?
A l’EPFL et à l’UNIL, des chercheurs ont démontré qu’il existe un mode de déplacement sur sol plat bien plus efficace pour les robots, qui ne sont pas limités par le paramètre «adhésif» des pattes. Les robots inspirés des insectes devraient donc s’émanciper de leur modèle, et adopter un nouveau mode de déplacement «bi-pod». La recherche est publiée dans Nature Communications.
Les chercheurs ont utilisé de nombreuses simulations, effectué des tests sur des robots, puis mené des expériences avec des Drosophila melanogaster, les insectes les plus communément étudiés en biologie. «Nous avons voulu comprendre pourquoi les insectes utilisent le déplacement en trépied. Il s’agissait de voir si ce mode de marche était le plus efficaces pour les espèces à six pattes, et pour les robots», explique Pavan Ramdya, co-premier auteur de l’étude.
Pour tester ces combinaisons, les scientifiques ont simulé le déplacement d’une mouche drosophile modélisée en utilisant des algorithmes de type évolutionnistes. Ces algorithmes effectuent une sélection progressive des modes de déplacement possibles, éliminant peu à peu les solutions les plus lentes.
Le facteur déterminant : les pattes adhésives
Les conclusions constituent un éclairage aussi bien pour les biologistes que pour les roboticiens. Les algorithmes ont désigné le mode trépied comme étant le plus optimal pour escalader une surface verticale de manière droite ou latérale, ou pour évoluer à plat avec des pattes adhésives. En revanche, les simulations ne prenant pas en compte le paramètre de l’adhésivité des pattes ont sélectionné un mode totalement nouveau et plus rapide sur sol plat. Il s’agit d’un mode «bi-pod» qui n’existe pas dans la nature. Avec cette démarche, seules deux pattes à la fois sont en contact avec le sol. «Nos résultats confirment une hypothèse de longue date en biologie, selon laquelle le mode trépied est dû à un environnement en trois dimensions, et à l’adhésivité des pattes», explique Pavan Ramdya. «Les robots devraient donc s’en détacher».
Munies de bottes, les mouches s’adaptent
A titre de test dans le monde du palpable, deux robots hexapodes réels ont été mis en compétition, l’un doté du mode trépied, et l’autre, du mode bi-pod. La démarche bi-pod s’est à chaque fois avérée la plus rapide, confirmant les résultats des algorithmes.
Enfin, des spécimens drosophiles ont été mis à contribution. A l’aide de gouttes de polymères, les scientifiques ont couvert les systèmes d’adhésion des insectes, comme s’ils enfilaient des bottes, puis ont observé leur comportement. Rapidement, les individus ont naturellement adopté un mode de déplacement bi-pod, ressemblant à celui qui avait été mis en lumière. « Cela montre que l’animal, au contraire des robots, adapte son déplacement face à une situation nouvelle», commente Robin Thandiackal, également co-premier auteur de l’étude. «Il y a un dialogue naturel entre la robotique et la biologie : beaucoup de robots s’inspirent de la nature, et, à l’inverse, des biologistes utilisent des robots pour comprendre le comportement de certaines espèces. Nous pensons que notre étude apporte des informations dans les deux domaines.»
-----
Source:
Climbing favors the tripod gait over alternative faster insect gaits, Nature Communications
-----

Liens
Images à télécharger