«La nature a travaillé en notre faveur»

© 2014 EPFL
La biorobotique s’inspire des solutions de locomotion développées par le monde animal pour concevoir des robots plus efficaces. Elle offre aussi aux biologistes de nouveaux outils pour l’étude des espèces. Spécialiste du domaine, le professeur Auke Ijspeert livre ses réflexions sur l’évolution de cette branche en plein essor.
Qu’elles volent, nagent, marchent ou rampent, les espèces animales ont développé une large gamme de solutions pour se déplacer efficacement dans leur environnement. Pour les bioroboticiens, ces modèles représentent une source d’inspiration pour la conception de robots capables d’évoluer sur tous les terrains. Auke Ijspeert, professeur au Laboratoire de biorobotique de l’EPFL vient de publier dans Science un article dressant le portrait de cette discipline en plein essor.
- Pourquoi la biorobotique s’est-elle si fortement développée ces dernières années?
«D’abord parce que la technologie elle-même s’est considérablement améliorée. Les techniques d’impression 3D permettent de faire rapidement des pièces compliquées, les puissance de calcul embarquées se multiplient d’année en année, les batteries deviennent plus compactes et faciles à utiliser. Cette évolution est également due aux développements de la biologie, qui offrent de nouveaux moyens pour étudier en détails les caractéristiques de la motion animale, tels que les films rayons X pour observer les mouvements des os en temps réel ou les capteurs de force pour mesurer les forces d’interactions avec le sol.
- A part fabriquer des jouets, à quoi cela sert-il?
La biorobotique est bien plus que cela. Elle s’inspire du monde animal pour aller plus loin que les traditionnels robots à roues, hélices ou chenilles, et trouver de nouvelles manières de faire avancer ces machines. Clairement, la nature a travaillé en notre faveur. Un animal ne pouvant survivre bien longtemps s’il se déplace mal, l’évolution a mis en place une palette de solutions de locomotion extrêmement bien adaptées à des terrains parfois très compliqués. Faire des robots capables de se déplacer dans un environnement non structuré – fait de bosses, de cailloux, de boue, de gravier, d’eau ou de sable – est un réel défi. Le monde animal nous offre un réservoir d’idées pour le relever.
- Si la robotique tire avantage de la biologie, l’inverse est-il également vrai?
Les biologistes sont de plus en plus nombreux à utiliser les robots comme outils scientiques. En faisant bénéficier les chercheurs de la vraie physique - par comparaison à de la physique des simulations numériques -, ces biorobots offrent un avantage indéniable pour tester certaines hypothèses. Etudier la nage d’un poisson, par exemple, demande de tenir compte d’un grand nombre de données: morphologie de l’animal, mouvements, vitesse et direction, force mise dans chaque muscle, mais aussi interaction avec le milieu, résistance de l’eau, etc. Ce sont autant de problèmes très complexes qui s’ajoutent les uns aux autres et s’inter-influencent. Le robot permet de les observer en direct, et ainsi d’être sûr d’intégrer tous les composants qui entrent en jeu. Et il y a un autre avantage important: on peut réaliser avec un robot des opérations impossibles avec un animal réel, comme l’équiper de multiples capteurs pour calculer des forces internes, répéter une expérience autant de fois que nécessaire ou modifier la morphologie. Doubler la longueur d’une patte permettra par exemple de comprendre l’influence de tel ou tel os sur l’efficacité de la locomotion. Ce qui bien sûr ne peut pas être fait sur un être vivant...

Robot salamandre. Crédit: BIOROB
- De quoi l’avenir de cette branche sera-t-il fait? Vers quoi va-t-on, selon vous?
Pour ce qui est contribution à la biologie, c’est un domaine qui émerge, où de nombreuses études sont possibles. Les biorobots seront aussi uilisés dans des applications de plus en plus variées, qu’il s’agisse de surveillance de l’environnement, d’agriculture, de recherche et secours aux victimes de catastrophes, ou de prospection sur des sites à haut risques, trop dangereux pour qu’on y envoie des humains ou des chiens. C’est d’ailleurs un des domaines de la robotique que nous adressons en Suisse dans le cadre du NCCR en Robotique.
- Marche, nage, vol, reptation: quel est le mode de locomotion le plus intéressant?
Chacun a un intérêt. Prenons la nage. Observer l’efficacité des poissons à évoluer dans leur milieu permet de trouver des alternatives aux hélices, et ainsi créer des robots autonomes plus performants, voire améliorer les principes de navigation ou la conception de bateaux. Les robots à pattes sont particulièrement indiqués en présence d’un sol non structuré, car ils offrent des contacts ponctuels avec le sol, contrairement aux robots à roues nécessitant un contact continu. Pour ce qui est du vol, le modèle à hélices, de type hélicoptère, reste le plus efficace et simple à construire pour des engins de grande taille. Un système faisant battre des ailes est plus adéquat en cas de petite taille. La dynamique des fluides fait que pour un insecte, se mouvoir dans l’air revient au même que si nous bougeons dans de l’huile. A cette échelle, une hélice sera donc moins efficace qu’un mouvement oscillatoire.
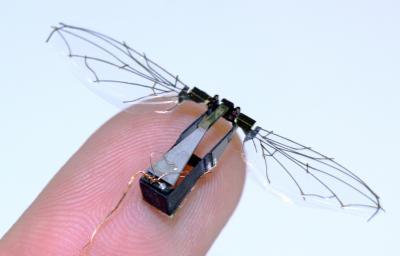
Credit: Harvard Microrobotics Lab
- Et notre marche à nous, humains?
Le modèle humanoïde est bien adapté s’il est destiné à évoluer parmi les humains, où il doit monter des escaliers, manipuler des outils, etc. S’il s’agit de se déplacer à l’extérieur, d’autres moyens, comme la marche quadrupède, seront meilleurs. Il est intéressant de relever que la biorobotique a, là aussi, servi la biologie en démontrant que la mécanique, et non seulement le cerveau, résoud une partie des problèmes de contrôle. Des expériences ont prouvé que des robots humanoïdes parviennent à descendre une pente sans moteur, sans batterie et sans tomber, la morphologie humaine produisant un effet de pendule, qui donne l’énergie et la stabilité nécessaire. Il y a donc une intelligence du corps, qui permet, si on la comprend, d’imaginer une locomotion plus fluide, efficace et nécessitant moins d’énergie.
- Quels sont les plus grandes difficultés que rencontre un bioroboticien?
En premier lieu, concevoir de tels robots implique de disposer de larges équipes et d’une palette d’expertises en mécanique, informatique, électronique, mathématiques. Ensuite, comprendre le mouvement d’un être vivant implique la prise en compte d’énormes quantités de données, mais certaines sont également très difficiles à reproduire. Restituer les propriétés viscoélastiques d’un bras est par exemple très compliqué au niveau mécanique. Et toutes les technologies qui nous permettraient d’y parvenir ne sont pas encore abouties, notamment pour ce qui est des substituts de peau ou des actuateurs, qui peinent encore à répliquer les muscles de manière fidèle. Or, ce sont des éléments qui jouent un rôle dans le fait qu’un mode de locomotion fonctionne.
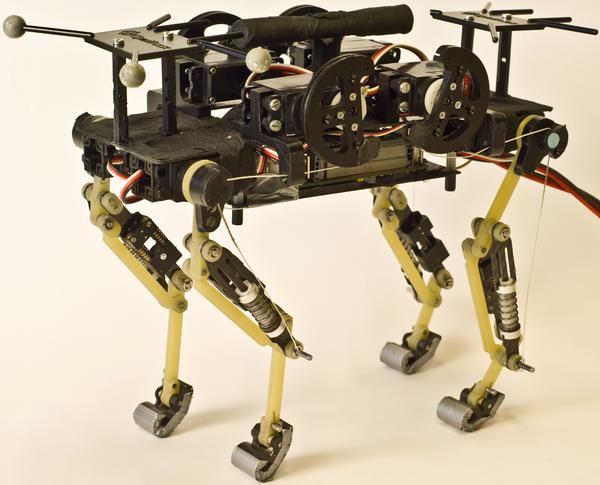
Robot chat. Crédit: BIOROB
- Un mouvement qui nous semble banal et simple est en fait une opération complexe?
Plus je fais de la robotique, plus je réalise à quel point chaque être vivant résout en permanence des problèmes de contrôles extrêmement compliqués. Comme on le fait de manière intuitive, on a tendance à sous-estimer tout ce que ces gestes impliquent. Essayer d’intégrer dans un robot tous les composants que l’on a pu identifier est d’ailleurs un exercice intéressant. On se rend souvent compte que ce qu’on croyait avoir compris sur le papier ne fonctionne pas dans la pratique. Il manque en général certaines données ou la compréhension de certains mécanismes. Ce sont parfois des détails, des interactions subtiles qui n’ont pas été déchiffrées , mais qui sont essentiels lorsqu’on se met à interagir avec l’environnement.»